スポンサーリンク
IAI製ロボシリンダー(コントローラPCON) を三菱FXシーケンサの
CC-LINKで制御 実際の回路図、ラダープログラムも公開しています。
■今回使用する機器
〇 アクチェータ
型式:RCP6-SA6R-WA-42P-3-600-P3-S-MR
RCP6シリーズ SA6Rタイプ WA(バッテリーレスアブソタイプ)
42Pパルスモーター リード 3mm ストローク 600mm (適応コントローラPCON)

〇 コントローラ(CC-LINK接続タイプ)
型式:PCON-CB-42P-WAI-CC-0-0
PCONシリーズ CB(高機能タイプ)
42角パルスモータ対応
WAI(バッテリーレスアブソタイプ)
CC (CC-LINK接続タイプ)
0 (ケーブル無し)0 (DC24V)

コントローラ (SCON)
〇 CC-LINKユニット
三菱FXシーケンサの型式:FX3UC-16CCL-M
■回路図
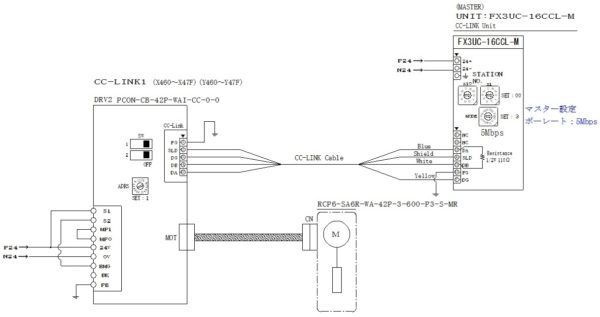
上図の様にCC-LINK接続ですので、凄く省配線です。
コントローラはバッテリーレスなので
バッテリーはありません。
■CC-LINK設定
〇 MASTER側
三菱製CC-LINKユニット
型式:FX3UC-16CCL-M
ステーションNo.:0
伝送速度設定:3(5Mbps)
〇 SLAVE側
IAI製コントローラ (PCON)
型式:PCON-CB-42P-WAI-CC-0-0
CC-LINKの設定はハードスイッチではなく
ソフトでパラメータ設定が必要です。
その為にはパソコン対応ソフト『RCM-101-USB』が
必要です。
RCM-101-USBはパソコンソフト(RC用パソコン対応ソフト)
及び変換器、USBケーブル、専用ケーブルがセットになっています。
RC用パソコン対応ソフトをパソコンにインストールし
パソコンとPCONをケーブルで接続しパラメータを設定します。
■パラメータ設定(SLAVE側PCON)
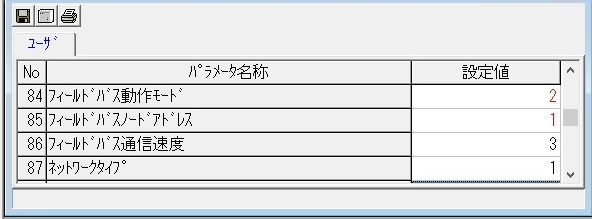
〇 パラメータNo.84(フィールドバス動作モード):2
これは上位(三菱PLC)からの制御方式を5種類から選択できます。
0:リモートI/Oモード
予めコントローラにポジションを登録し、ポジションNo.を上位から指定し
目標のポジションへ移動させるモードです。
1:ポジション/簡易直値モード
予めコントローラにポジションデータ(目標位置以外の速度や加速度等)を登録し
ポジションNo.を上位から指定し、目標位置はその都度、PLCから数値指定する
モードです。
2:ハーフ直値モード
目標位置、速度、加減速度、押付け力を上位PLCより都度
直接数値指定するモードです。
3:フル直値モード
全ての値を都度、上位PLCより直接数値指定するモードです。
4:リモートI/Oモード2
リモートI/Oモードと同じですが、上位PLCへ『現在位置』『電流値』の
2つを数値出力できます。
〇 パラメータNo.85(フィールドバスノードアドレス):1
CC-LINKネットワーク上のコントローラ(SCON)のアドレスを
設定します。
上の回路図の様に、SLAVE側はSCONのみの場合は設定値1となります。
〇 パラメータNo.86(フィールドバス通信速度):3
0:156Kbps
1:1625Kbps
2:2.5Mbps
3:5Mbps
4:10Mbps
MASTER側の三菱製CC-LINKユニットの設定と合致している必要が
あります。
■パラメータ設定(MASTER側 三菱PLC)
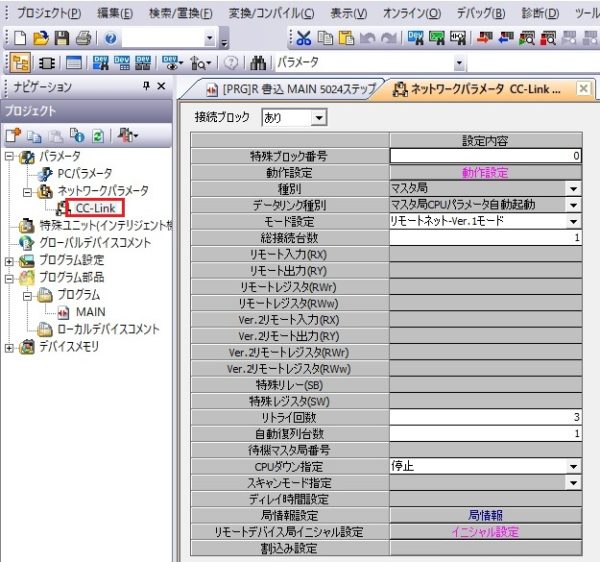
特殊ブロック番号:0
種別:マスタ局
モード設定:リモートネットver.1モード
総接続台数:1
今回の様にSLAVE側はPCON1台のみの場合は
設定値は1となります。
FXシーケンサの場合はリモート入出力の各先頭アドレスを指定しません。
記載のない箇所はデフォルト設定のままです。
〇 局情報設定

上図の様に設定します。
局種別:インテリジェンスデバイス局
占有局数:2局占有 (ハーフ直値モードは2局占有となります)
リモート局点数:64点
記載のない箇所はデフォルト設定のままです。
スポンサーリンク
■ラダープログラム
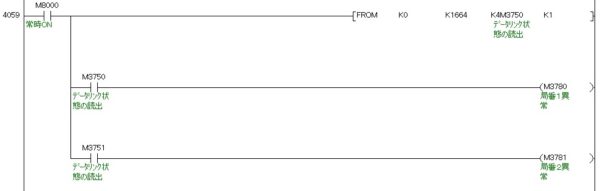
ラダープログラムの説明
1行目:データリンク状態の読出
2,3行目:異常局のリレー出力(今回は局番1しかありませんので局番2のコイルは不要)
———————————————————————————————-
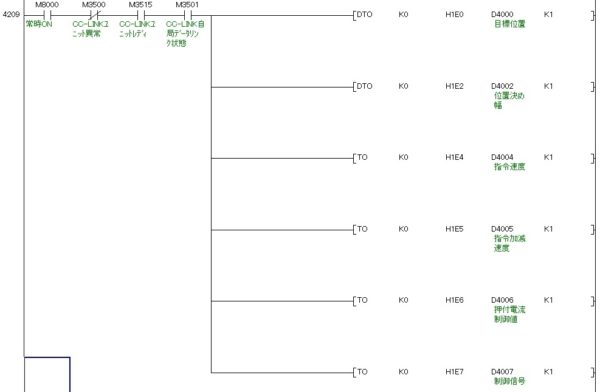
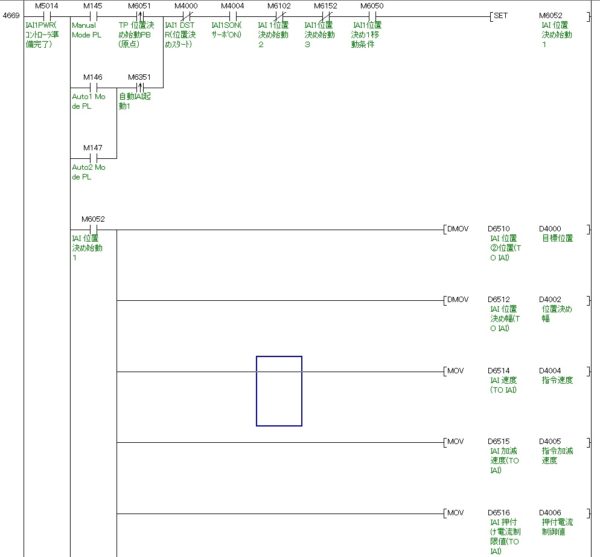
ラダープログラムの説明
位置決めデータの書き込みプログラム
——————————————————————————————-
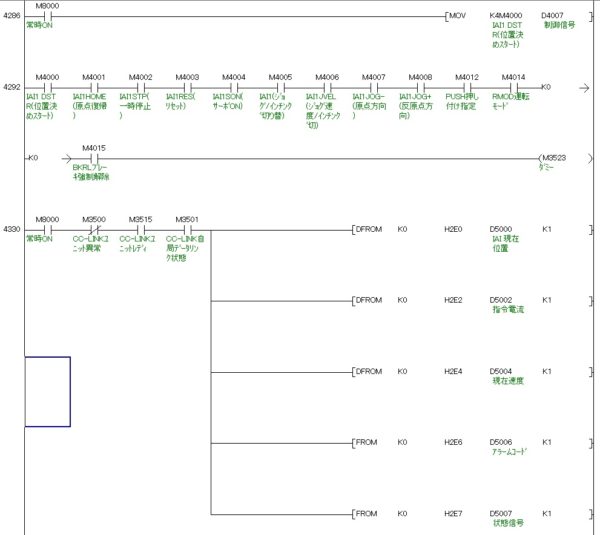
ラダープログラムの説明
1行目:PLCからIAIへの各運転指令
2,3行目:M4000~M4015の信号モニター用(削除しても良いラダー)
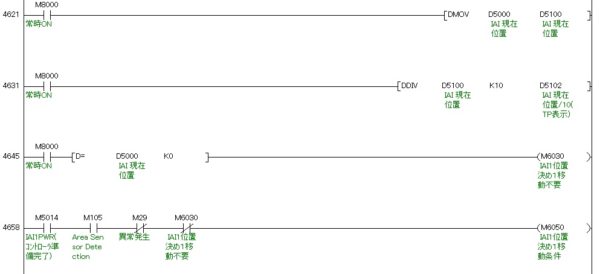
5行目~:現在位置、現在速度、アラームコードなどをIAIからPLCに読み込む
——————————————————————————————-

ラダープログラムの説明
1行目:IAIからPLCへ状態信号を読み込む
——————————————————————————————-
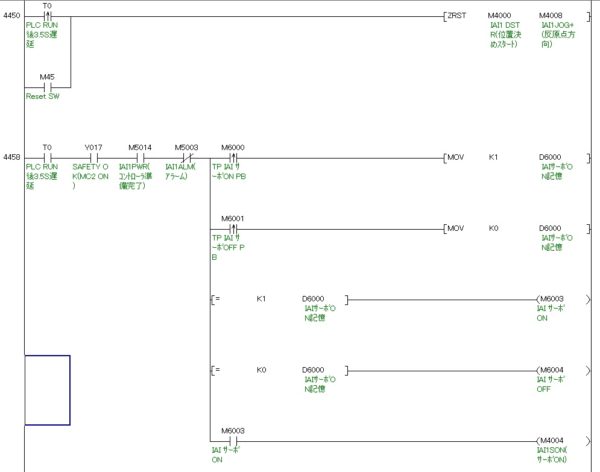
ラダープログラムの説明
1.2行目:各指令信号をリセットする回路
3行目~:サーボON/OFF指令の回路
——————————————————————————————-
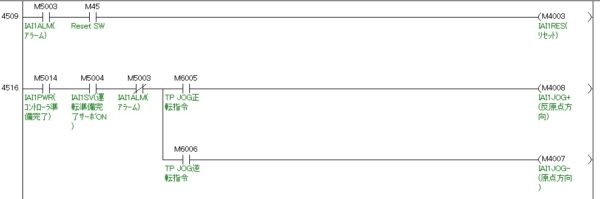
ラダープログラムの説明
1行目:アラームリセットする回路
2,3行目~:JOG運転指令の回路
——————————————————————————————-
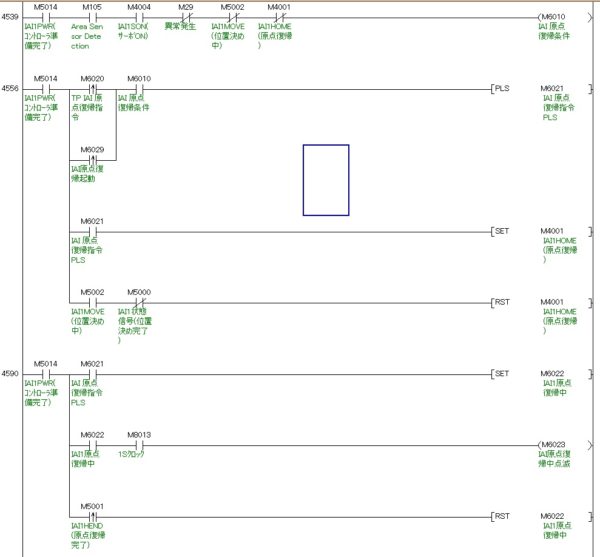
ラダープログラムの説明
原点復帰指令プログラム
——————————————————————————————-
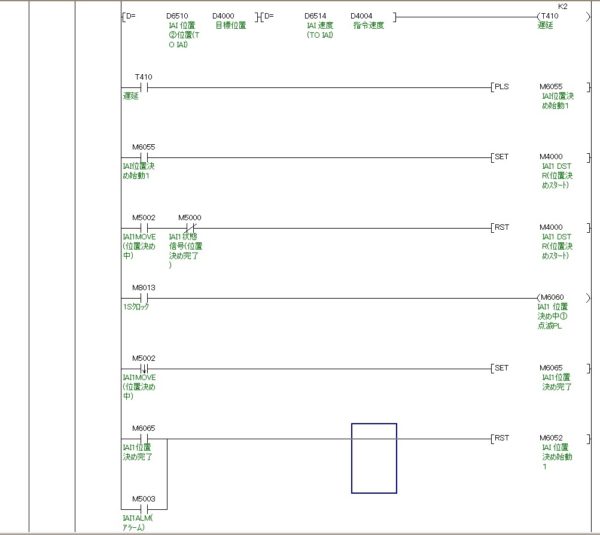
ラダープログラムの説明
位置決め指令プログラム
スポンサーリンク
三菱 CC-Link 入門 接続/設定編 三菱 CC-Link 入門パラメータ&ラダー編
トップページに戻る
当記事は、2021年11月11日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。