スポンサーリンク
IAI製4軸スカラロボット(コントローラMSEL) を三菱Qシーケンサの
CC-LINKで制御 実際の回路図、ラダープログラムも公開しています。
■今回使用する機器
〇 スカラロボット
型式:IXP-4N2508-WA-S-P3
水平多関節4軸ロボット
アーム長250mm 上下軸80mm WA(バッテリーレスアブソタイプ)
CC-Link通信対応タイプ (適応コントローラMSEL)

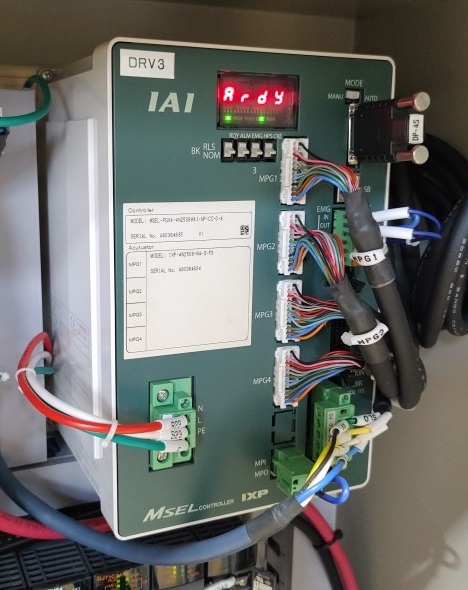
〇 コントローラ(CC-LINK接続タイプ)
型式:MSEL-PGX4-4N2508WAI-NP-CC-0-4
IXPスカラロボット4軸対応
WAI(バッテリーレスアブソタイプ)
CC (CC-LINK接続タイプ)
■回路図
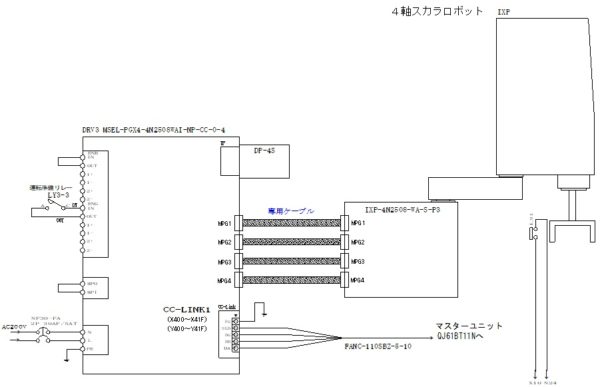
〇 CC-LINKユニット
三菱Qシーケンサの型式:QJ61BT11N
上図の様にCC-LINK接続ですので、凄く省配線です。
コントローラはバッテリーレスなので
バッテリーはありません。
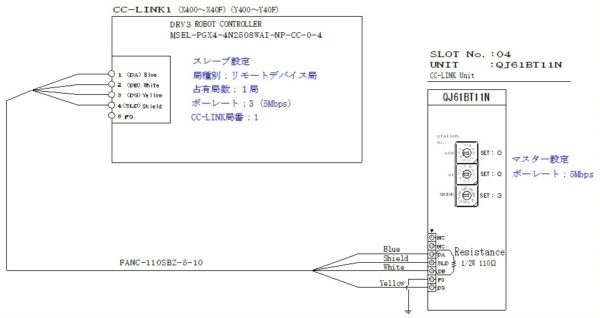
■CC-LINK設定
〇 MASTER側
三菱製CC-LINKユニット
型式:QJ61BT11N
ステーションNo.:0
伝送速度設定:3(5Mbps)
〇 SLAVE側
IAI製コントローラ (MSEL)
型式:MSEL-PGX4-4N2508WAI-NP-CC-0-4
CC-LINKの設定はハードスイッチではなく
ソフトでパラメータ設定が必要です。
その為にはパソコン対応ソフト『X-SELパソコン対応ソフト』が
必要です。今回のMSELも対応しています。
X-SELパソコン対応ソフトはパソコンソフトと
USBケーブルがセットになっています。
対応ソフトをパソコンにインストールし
パソコンとMSELをケーブルで接続しパラメータを設定します。
■パラメータ設定(SLAVE側MSEL)
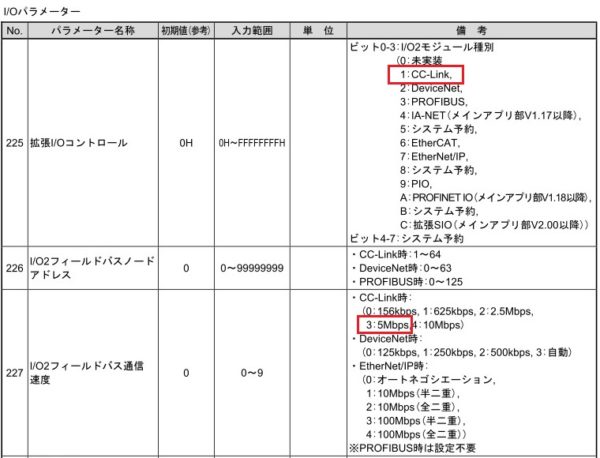
↑ マニュアルのパラメータリスト
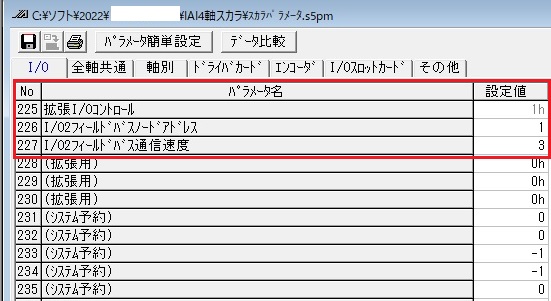
↑ X-SELパソコンソフトのパラメータ設定画面
〇 パラメータNo.225(拡張I/Oコントロール):1h
これはCC-Link通信の設定です。
〇 パラメータNo.226(I/Oフィールドバスノードアドレス):1
これはSLAVE側MSELコントローラのCC-Linkアドレスです。
〇 パラメータNo.227(I/Oフィールドバス通信速度):3
これはCC-Linkの通信速度設定です。
MASTER側の三菱製CC-LINKユニットの設定と合致している必要が
あります。
■パラメータ設定(MASTER側 三菱Q PLC)
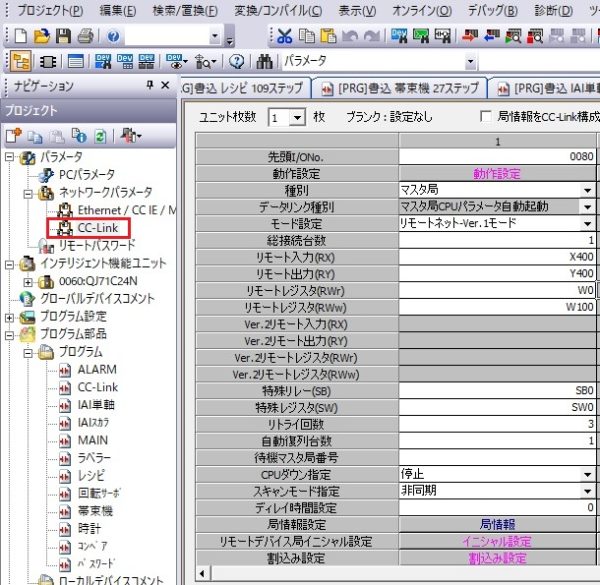
先頭I/O No.:80
(今回マスタユニットQJ61BT11Nはベースユニットの4スロット目に挿入した為)
種別:マスタ局
モード設定:リモートネットver.1モード
総接続台数:1
今回の様にSLAVE側はMSEL 1台のみの場合は
設定値は1となります。
リモート入力(RX):X400
リモート出力(RY):Y400
リモートレジスタ(RWr):W0と設定していますが、今回は使用しません。
リモートレジスタ(RWw):W100と設定していますが、今回は使用しません。
記載のない箇所はデフォルト設定のままです。
〇 局情報設定

上図の様に設定します。
局種別:リモートデバイス局
(インテリジェンスデバイス局ではありません。)
占有局数:1局占有
リモート局点数:32点
記載のない箇所はデフォルト設定のままです。

スポンサーリンク
■ラダープログラム
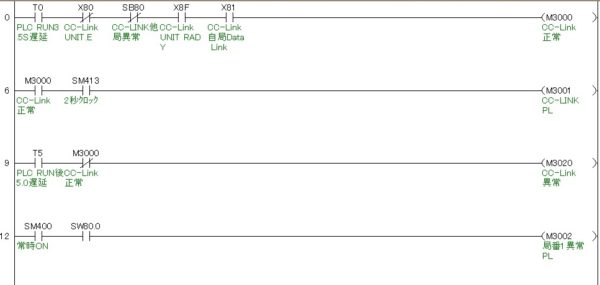
ラダープログラムの説明
1行目:データリンク状態の読出
2~4行目:リンク正常表示、異常局の出力
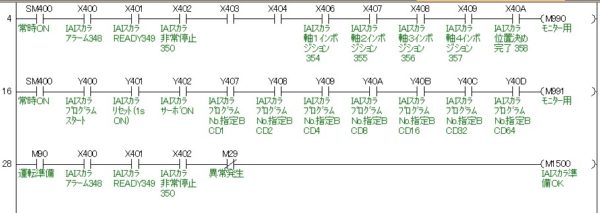
ラダープログラムの説明
ロボットの状態のモニター
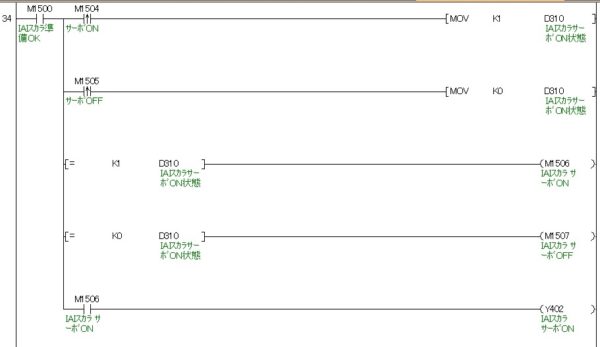
ラダープログラムの説明
ロボットのサーボONプログラム
——————————————————————————————-
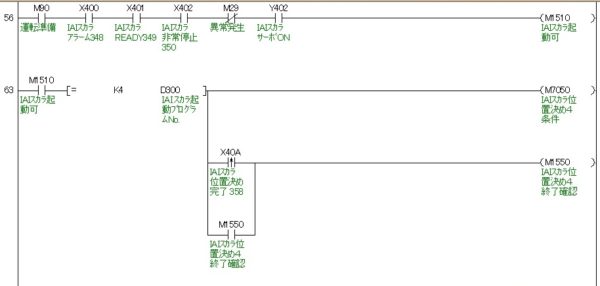
ラダープログラムの説明
運転可能モニターと運転終了モニター
(ロボットプログラムNo.4の場合)
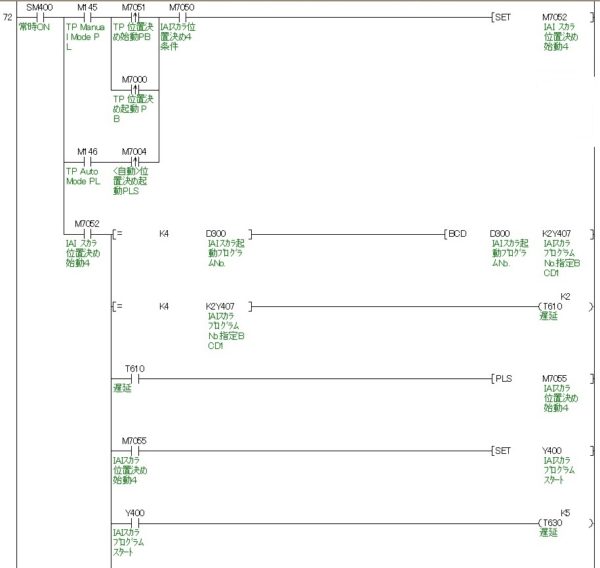
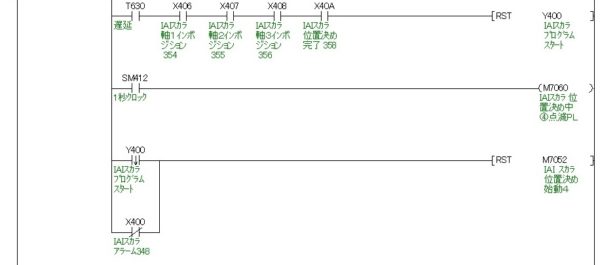
ラダープログラムの説明
位置決め起動プログラム
(ロボットプログラムNo.4の場合)
——————————————————————————————-
スポンサーリンク
トップページに戻る
当記事は、2022年7月29日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。