スポンサーリンク
三菱サーボモーター制御 SSCNETⅢ 絶対位置検出用
バッテリー電圧低下検出ラダープログラム実例付で解説致します。
○テスト条件
・サーボモーターはHG-KR43Bを使用
・サーボアンプはMR-J4-40Bを使用
・位置決めユニットはQD77MS2を使用
・シーケンサCPUはQ02UCPU を使用
・パソコンソフトはGX-Works2 を使用
・バッテリー(MR-BAT6V1SET)を搭載し※1アブソリュート型とする。
※1ページの最後で説明
サーボモーターを絶対位置仕様(アブソリュート仕様)で動作させるには
必ず、バッテリーを取り付ける必要があります。
ここで使用するバッテリーは充電不可ですので、交換が必要です。
サーボアンプのバッテリーは消耗しますと、記憶している原点位置や現在位置の
情報が消失し、バッテリーを交換し、原点位置の設定を
再設定しないと使用できません。
サーボアンプのバッテリー消耗によるトラブルを避ける為、サーボアンプで
検出されるバッテリー関係のワーニングコードをPLC(シーケンサ)のラダーで
読み取り事前に警報を出すラダープログラムを紹介致します。
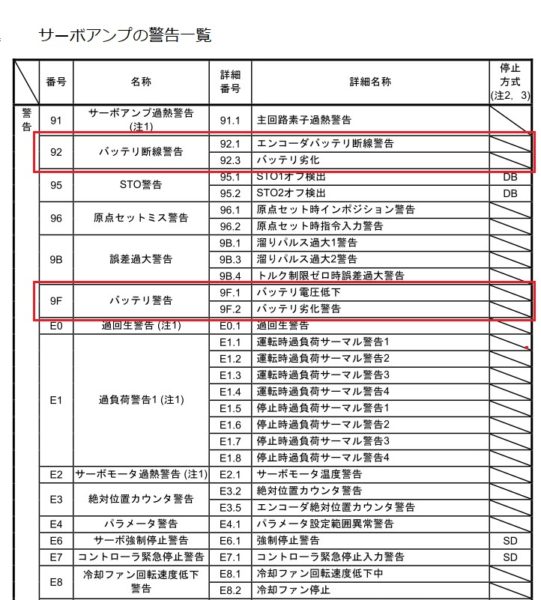
上図にある様に、サーボアンプが92番と9F番の警告が出たときに
ラダープログラムにより検知することとします。
↓位置決めユニット(QD77MS2)のワーニングコード表
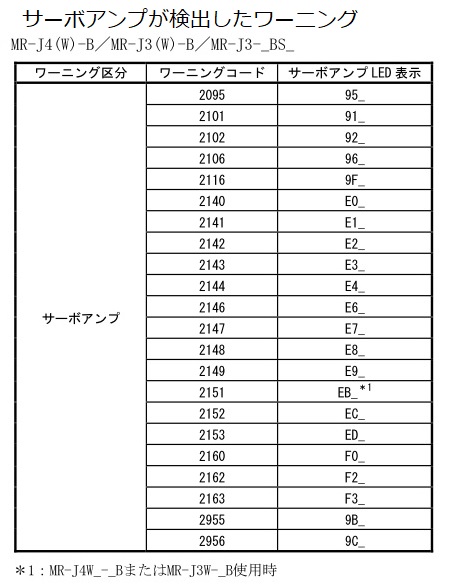
上図にある様に、ワーニングコード2102番と2116番の警告が出たときに
ラダープログラムにより検知することとします。
↓位置決めユニット(QD77MS2)のワーニングコード読み出し用バッファメモリアドレス


今回1軸しか使用していませんので、上図から、ワーニングコードを読み出す
バッファメモリアドレスは807番となります。
↓パソコンソフトはGX-Works2 のパラメータI/O割付表です。

上図から位置決めユニット(QD77MS2)はスロット1に装着されており
先頭アドレスは0020(20)です。
スポンサーリンク
↓パソコンソフトはGX-Works2 のラダープログラムです。
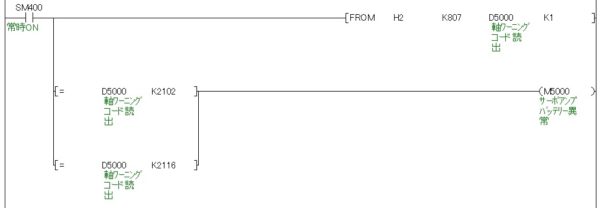
ラダープログラムの解説
1行目:バッファメモリアドレス807からワーニングコードを
データレジスタD5000に読み出す回路
2行目と3行目:読み出ししたワーニングコードNo.が2102番と2116番の何れか
であった場合にM5000のコイルがONし警告を出す。
※1
アブソリュート型とは絶対位置検出システムです。
完全に電源がOFFとなっても、バッテリーで現在位置を記憶していますので
原点復帰が不要となるメリットや、サーボOFF時に外的要因でサーボモーター軸が
回されても、位置のカウントは常に(電源OFFでも)監視しカウントがズレル心配が
ありません。
これで三菱サーボモーター制御 SSCNETⅢ 絶対位置検出用
バッテリー電圧低下検出ラダープログラム実例付で解説を終了させて頂きます。
スポンサーリンク
トップページに戻る
当記事は、2022年8月4日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。