スポンサーリンク
DENSO(デンソー)製 小型 垂直多関節6軸ロボット VS087をCC-Linkにて
制御しましたので記事にさせて頂きます。
このページではロボット制御のシーケンスソフト(ラダー)について
記載させて頂きます。

ロボットの紹介とCC-Link接続、設定について
下記リンクのページで記載しています。
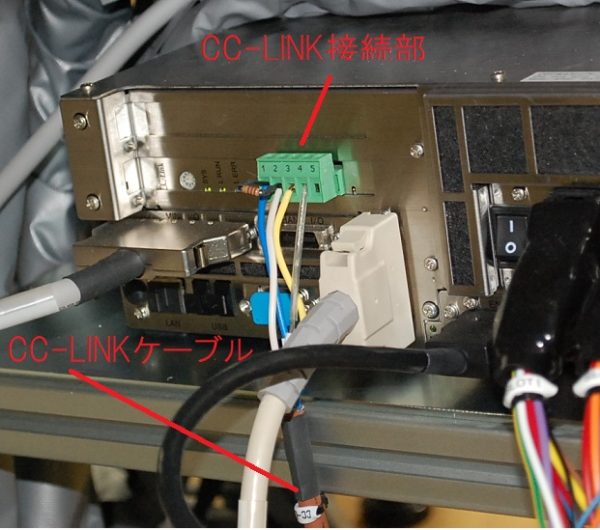
CC-Link で制御(接続編)にて記載致しましたが
ロボットと制御側のシーケンサ(PLC)がCC-Link接続
されています。
レンガ色のケーブルがCC-Linkケーブルです。
【シーケンスラダープログラムの解説】
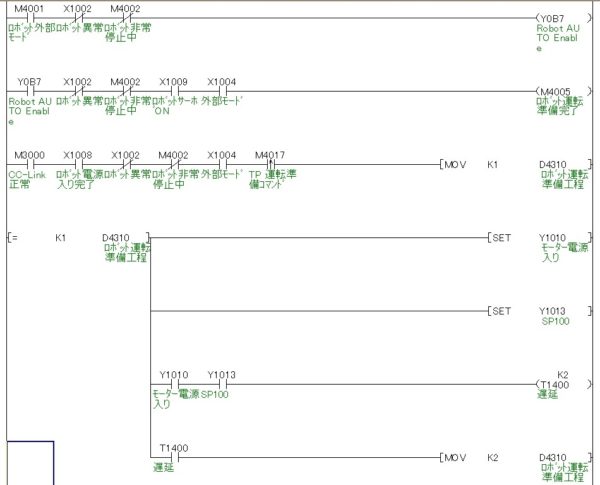
運転準備(サーボON) のラダープログラムです。
3行目の M4017 がタッチパネルのサーボ0N スイッチです。
起動条件がOKであれば、M4017のONが
受付られて、データレジスタD4310が 1 になり
ラダープログラムが下方向に進みます。

スポンサーリンク
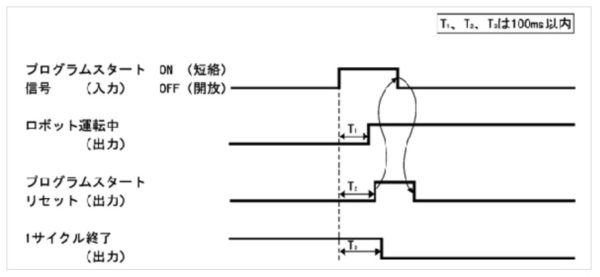
ここからがロボットを起動させるプログラムになります。
まずタイミングチャートを下記に示します。
このタイミングで信号を出せば、ロボットが
起動します。
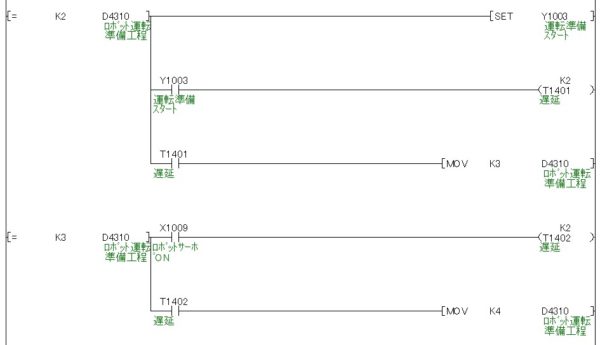
下図のラダーの解説です。
ロボットプログラムNo,14を起動させるラダープログラムです。
M4013↑の接点がタッチパネル上の起動釦です。
起動条件がOKであれば、M4013のONが
受付られて、データレジスタD4311が 1 になり
ラダープログラムが下方向に進みます。
ロボットの起動用プログラム番号のI/O (Y1008)にBCDで転送します。
今回は14(1110) を転送します。
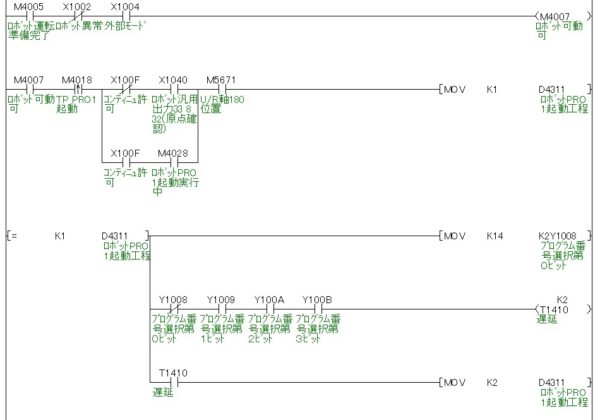
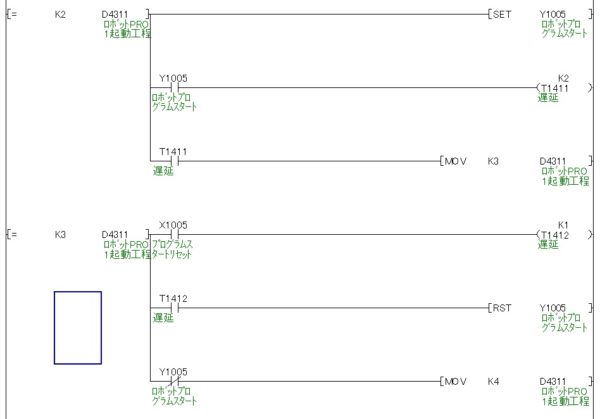
次はスタート信号(Y1005)をONします。
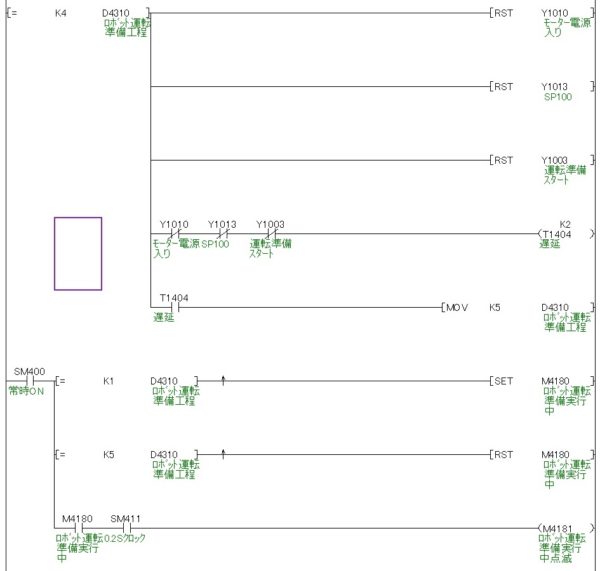
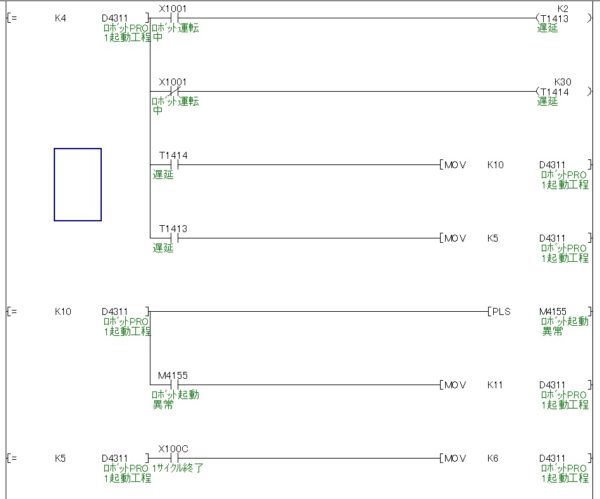
ロボット運転中を確認するプログラムです。
問題なくロボットプログラムNo,14が動作すれば
X100C(1サイクル終了)がONします。
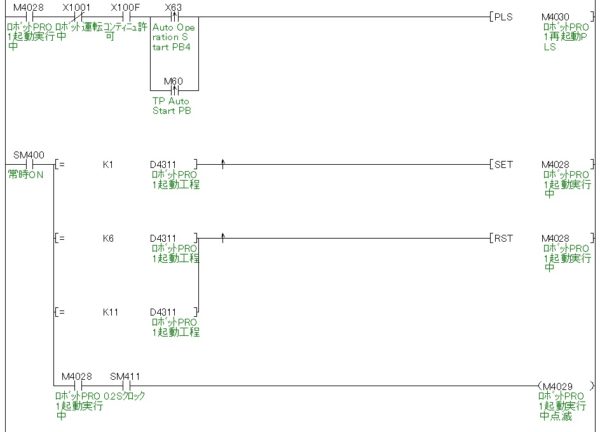
ロボットが稼働中にエリアセンサ干渉などにより、ポーズとなった場合に
再起動(継続運転)するプログラムです。
ポーズ中は X100F コンティニュ が出力されます。
今回のプログラムでは、X63のスイッチか又はタッチパネルのM60のスイッチを
押せば、再スタートする様にしています。
これでDENSO(デンソー)製 小型 垂直多関節6軸ロボット VS087をCC-Linkにて
制御 シーケンスラダー編の解説を終了させて頂きます。
最後までご覧いただきましてありがとうございました。
スポンサーリンク
当記事は、2020年11月14日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。