スポンサーリンク
三菱サーボモーター制御入門(今回の例 MR-J4)SSCNETⅢラダープログラム編①
実例付で解説致します。
このページは前回公開の
『パラメータ設定編』の続きのページとなります。
パラメータ設定編は下記のページを参照お願い致します。
○テスト条件
・シーケンサCPUはQ00UJCPU を使用。
・パソコンソフトはGX-Works2 またはGX-Developerを使用
・極力省配線となる回路とする。
・バッテリー(MR-BAT6V1SET)を搭載し※1アブソリュート型とする。
※1ページの最後で説明
○使用機器の選定
・位置決めユニット:QD77MS2(2軸 SSCNETⅢ対応)
・サーボアンプ:MR-J4-40B(400W 型式の末尾はBはSSCNETⅢ対応)
・サーボモーター:HF-KR43B(400Wブレーキ付)
○ラダープログラム作成
今回の解説はGX-Works2で行いますが、GX-Developerでも設定できる様に
GX-Works2のインテリジェント機能での設定は使わずに
TO 命令を使いラダープログラムで設定します。
まずは、位置決めユニットとCPUの入出力の関係を確認します。
位置決めユニットQD77MS2はCPUとデータをやり取りする為
入力32点、出力32点を使用します。
(これは決まっていますので変更不可です)
一覧表
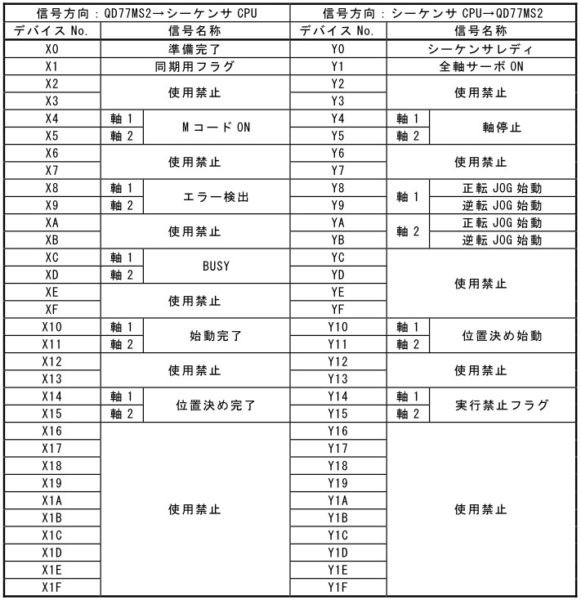
今回位置決めユニットの位置がスロット0なので
上記のX0~X1F , Y0~Y1Fとなりますが
仮に今回対象の位置決めユニットがスロット1だった場合は
どうなるかですが、スロット0も同じ位置決めユニットで
占有I/O点数が32点だった場合は X20~X3F , Y20~Y3Fとなります。
ここからは実際のラダーソフトを使って解説していきます。
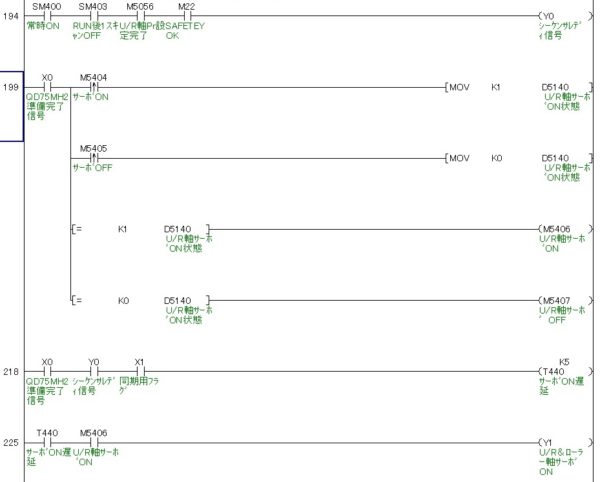
1行目:位置決めユニットに動作OKの許可を出すラダーです。
2~7行目:サーボON/OFFのラダーです。
1行目でY0をONし問題が無ければX0がONします。
タッチパネルのサーボONボタンM5404を押せばデータレジスタ D5140に1を書き込みます。
D5140が1であればコイル M5406がONします。
M5406がONとなれば7行目でコイルY1がONとなりサーボONとなります。
データレジスタを使っている理由は一旦電源がOFFとなっても直前の状態(ONかOFFか)を
記憶しておく為です。※2
タッチパネルのサーボOFFボタンM5405を押せばデータレジスタ D5140に0を書き込みます。
D5140が0であればコイル M5406がOFFします。
M5406がOFFとなれば7行目でコイルY1がOFFとなりサーボOFFとなります。
コイルM5407はタッチパネルのサーボOFFランプ表示用です。
※2 CPUのパラメータ設定→デバイス設定にてD5140をラッチ指定しておく
必要があります。
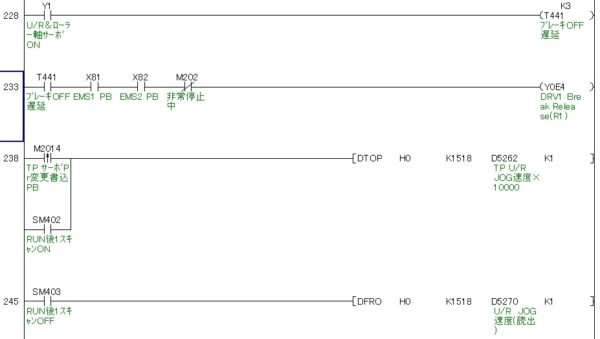
1~2行目:サーボモーターのブレーキを制御するラダーです。
サーボONから0.3秒のタイミングをとってからブレーキを解除しています。
サーボOFFの時はブレーキONで、サーボONの時はブレーキOFFです。
サーボONでかつブレーキONは基本的にNGです。
やってはいけないことになっています。
3行目以降:JOG速度を書き込むラダーです。
タッチパネルのサーボパラメータ書き込みボタンM2014を押した時か又は電源ON後の
1スキャンだけ書き込みするラダーです。
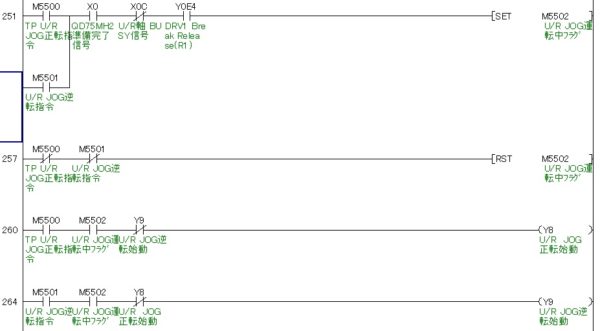
上記全てJOG操作の為のラダーです。
タッチパネルのJOG正転起動用ボタンM5500を押している間だけ正転方向にJOG動作します。
タッチパネルのJOG逆転起動用ボタンM5501を押している間だけ逆転方向にJOG動作します。
スポンサーリンク

ワーニングコードを取得するラダーです。
FROM命令で常時データレジスタD5284にワーニングNo.が入っています。
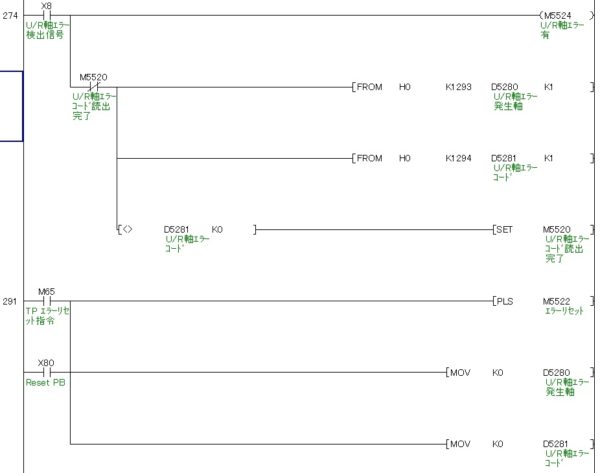
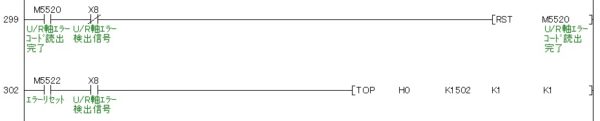
上記全てエラーコードの為のラダーです。
位置決めユニットにエラーがあればX8がONします。
X8がONした場合FROM命令でエラー発生軸とエラーコードを取得します。
(今回は1軸だけなのでエラー発生軸は不要ですが)
タッチパネルのエラーリセットボタンM5522を押せば位置決めユニットに
エラーリセット命令を出します。
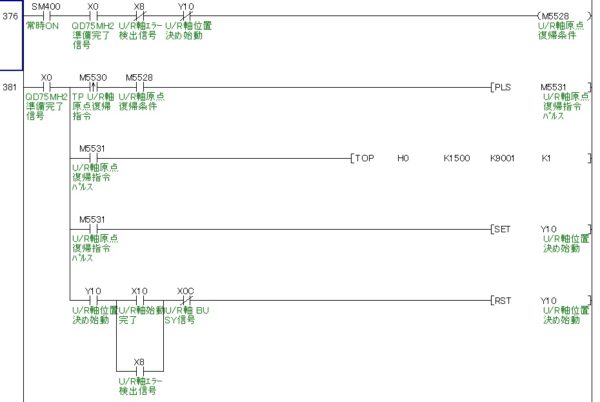
上記全て原点復帰の為のラダーです。
1行目:原点復帰条件
2行目:タッチパネルの原点復帰ボタンM5530を押すと原点復帰が実行される。
3行目:機械原点復帰のパラメータがセットされる。
4行目:位置決め信号Y10がONとなり原点復帰が起動する。
5行目:原点復帰が正常に完了すればX10がONとなり原点復帰が完了する。
またはエラーとなりX8がONしても原点復帰が完了となる。
TOP:バッファメモリに書き込みする命令
H0:対象の位置決めユニットがスロット0(ゼロ)に挿入されているので
先頭I/Oアドレスが0(ゼロ)なのでH0とする。
仮に今回対象の位置決めユニットがスロット1だった場合は
どうなるかですが、スロット0も同じ位置決めユニットで
占有I/O点数が32点だった場合は H2 となります。
K1500:軸1を指定 (軸2:K1600 , 軸3:1700 , 軸4:1800)
K9001:機械原点復帰の指定
K1:1データを指定
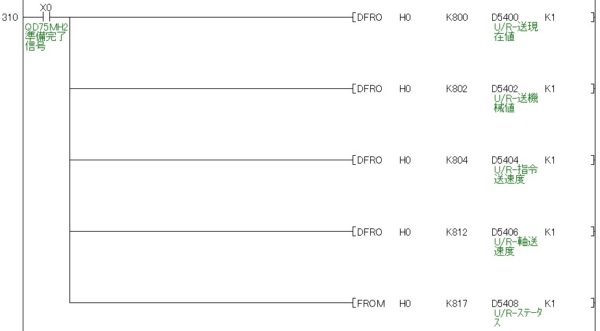
上記全て位置決めユニットのデータ読み出しの為のラダーです。
最終行のステータスについて
FROM命令で位置決めユニットのバッファメモリアドレス 817番のデータをデータレジスタ
D5408に読み出すラダーです。
位置決めユニットのバッファメモりアドレス 817番(ステータス)の内容は下記です。

原点復帰完了で b4がONとなり、b4=1 となる。
なので 原点復帰が完了した場合10000 となり16進モニタ値は0010=H10となる。
及びワーニングはあるが原点復帰が完了した場合1000010000 となり
16進モニタ値は0210=H210となる。
よってD5408がH10(又はK16)の時とH210(又はK528)の時だけ原点復帰が
正常に完了したと判断する。
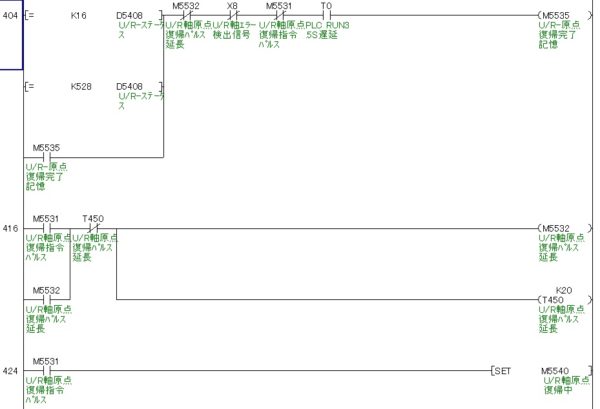
上記全て原点復帰関係のラダーです
先頭行:ステータスがK16か又はK528の時に原点復帰完了と判断するラダーです。
※1
アブソリュート型とは絶対位置検出システムです。
完全に電源がOFFとなっても、バッテリーで現在位置を記憶していますので
原点復帰が不要となるメリットや、サーボOFF時に外的要因でサーボモーター軸が
回されても、位置のカウントは常に(電源OFFでも)監視しカウントがズレル心配が
ありません。
これで三菱サーボモーター制御入門(今回の例 MR-J4)SSCNETⅢラダープログラム編①の
解説を終了させて頂きます。
この解説の続きのラダープログラム編②(位置決めラダー)は下記です。
三菱サーボモーター入門 SSCNETⅢラダープログラム編② 実例付スポンサーリンク
トップページに戻る
当記事は、2022年8月5日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。