スポンサーリンク
三菱サーボモーター制御入門(今回の例 MR-J4)SSCNETⅢラダープログラム編②
(位置決め)実例付で解説致します。
このページは前回公開の
『ラダープログラム編①』の続きのページとなります。
ラダープログラム編①は下記のページを参照お願い致します。
○テスト条件
・シーケンサCPUはQ00UJCPU を使用。
・パソコンソフトはGX-Works2 またはGX-Developerを使用
・極力省配線となる回路とする。
・バッテリー(MR-BAT6V1SET)を搭載し※1アブソリュート型とする。
※1ページの最後で説明
○使用機器の選定
・位置決めユニット:QD77MS2(2軸 SSCNETⅢ対応)
・サーボアンプ:MR-J4-40B(400W 型式の末尾はBはSSCNETⅢ対応)
・サーボモーター:HF-KR43B(400Wブレーキ付)
○ラダープログラム作成
今回の解説はGX-Works2で行いますが、GX-Developerでも設定できる様に
GX-Works2のインテリジェント機能での設定は使わずに
TO 命令を使いラダープログラムで設定します。
今回は位置決めプログラムです。
位置決めユニットに位置決め指令を出すために必要なデータを確認します。
下記は軸1の位置決めデータNo.ごとのバッファメモリアドレス表
| 位置決めデータNo.1 バッファメモリアドレス | ||
| 軸1 | 位置決め識別子 | 2000 |
| Mコード | 2001 | |
| ドウェルタイム | 2002 | |
| 指令速度 | 2004,2005 | |
| 位置決めアドレス/移動量 | 2006,2007 | |
| 円弧アドレス | 2008,2009 | |
| 位置決めデータNo.2 バッファメモリアドレス | ||
| 軸1 | 位置決め識別子 | 2010 |
| Mコード | 2011 | |
| ドウェルタイム | 2012 | |
| 指令速度 | 2014,2015 | |
| 位置決めアドレス/移動量 | 2016,2017 | |
| 円弧アドレス | 2018,2019 | |
| 位置決めデータNo.3 バッファメモリアドレス | ||
| 軸1 | 位置決め識別子 | 2020 |
| Mコード | 2021 | |
| ドウェルタイム | 2022 | |
| 指令速度 | 2024,2025 | |
| 位置決めアドレス/移動量 | 2026,2027 | |
| 円弧アドレス | 2028,2029 | |
位置決めデータNo.は1~600までです。
No.3まで上記に記載いたしましたがNo.4以降は省略させて頂きますが
同じ様にバッファメモリアドレスが割り振られています。
○位置決め識別子の解説
下記の表に希望する制御方法を当てはめて、位置決め識別子を作成します。
少々複雑ですが、順に解説していきます。
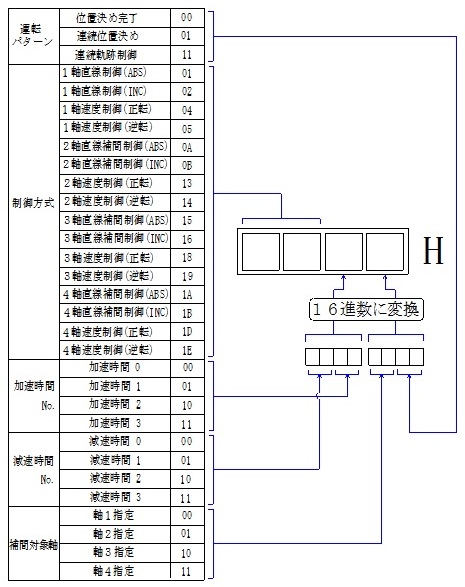
上記の表はよく使う項目のみに抜粋しています。
□□□□Hの部分の上2桁(□□□□H)は制御方式がそのまま入ります。
今回は1軸直線制御です。よって表から選定し 01 が入ります。
次は下から2桁目(□□□□H)ですが、ここは加速時間と減速時間です。
今回は加速時間 0 減速時間 0 です。よってどちらも 00 が入り 0000 です。
0000 を16進数に変換し、0 となります。
よって2桁目(□□□□H)は、0 となります。
最後は下から1桁目(□□□□H)ですが、ここは補間対象軸と運転パターンが
入ります。
1軸なので当然補間対象はありませんし、選択する必要も本来ないのですが
(1軸しかない場合、ここはどれを選択しても同じ結果となります)
補間対象軸は1軸を選択することとし 00 とします。
運転パターンは、連続位置決め(※2)とし 01 となります。
よって 0001 となり、16進数に変換すると 1 となります。
1桁目(□□□□H)は 1 となります。
上記から(□□□□H)の部分は 0101 となり
最終的に位置決め識別子は 101H となります。
※2
連続位置決めは位置決めが終了すれば、引き続き次の位置決めNo.の
位置決めが自動的にスタートします。
今回の場合は位置決めNo.1が終了すれば位置決めNo.2がスタートします。
位置決めNo.1と位置決めNo.2が連結しているということです。
位置決めNo.1で位置決め完了とする場合は100Hとして下さい。
○Mコードの解説
今回はMコードは使用しません。よって 0 とします。
Mコードは、機械のソレノイド、リレー等のON,OFF用信号を
位置決め開始や位置決め終了にあわせて出力するときに使用します。
「Mコード」には、以下の2つのモードがあります。
・WITHモード: 位置決め開始と同時にMコードを出力します。
・AFTERモード: 位置決め完了時にMコードを出力します。
○ドウェルタイムの解説
ドウェルタイムは位置決めが終了してから、位置決め完了信号がONするまでの
時間をドウェルタイムとして設定します。
0~65535(ms)まで指定できます。
○指令速度の解説
パラメータ Pr.1 の単位設定がmmの場合は 1~200000000まで(0が9個)設定できます。
単位は ×10-2mm/min(分)です。(10のマイナス2乗)
○位置決めアドレス/移動量の解説
目標となるアドレスまたは移動量を設定します。
設定値は制御方式により異なります。
ABS(アブソリュート)の場合、設定値は絶対アドレス(原点位置からのアドレス)で
設定します。
INC(インクリメント)の場合、移動量(現在アドレスからの)で設定します。
○円弧アドレスの解説
円弧アドレスは円弧補間制御を行う場合に必要なデータです。
今回は使用しませんので、デフォルトの 0 のままとします。
スポンサーリンク
では今回の参考ラダーを見てみましょう。
位置決めデータを書き込むラダーです。
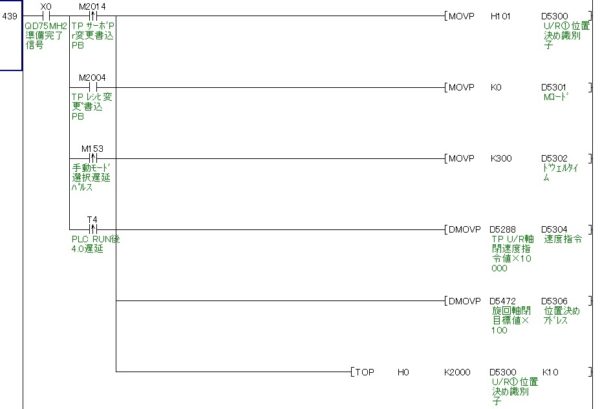
○ラダープログラムの解説
ラダーの左側は位置決めデータを書き込む条件です。
M2014とM2004はタッチパネルのボタンです。
M153はモード変更時のパルスです。
T4は電源立ち上げ時のパルスです。
| バッファメモリアドレス | 項目 |
| 2000 | 位置決め識別子 |
| 2001 | Mコード |
| 2002 | ドウェルタイム |
| 2004,2005 | 指令速度 |
| 2006,2007 | 位置決めアドレス/移動量 |
| 2008,2009 | 円弧アドレス |
D5300 位置決め識別子:H101(先の解説の『位置決め識別子の解説』で詳細解説済み)
D5301 Mコード:未使用なので 0
D5302 ドウェルタイム:300 (300ms程度でよいでしょうというアバウトです。)
D5303 空き
D5304,D5305 指令速度:タッチパネルから入力(32ビットデータ)
D5306,D5307 位置決めアドレス/移動量:タッチパネルから入力(32ビットデータ)
D5308,D5309 円弧アドレス:未使用なので 0(32ビットデータ)
(円弧アドレスは未使用なのでデフォルトの数値のままで良いので
D5308,D5309は元々0なので、0を書き込みしていません。)
以上の10データレジスタ D5300~D5309 までを一まとめとして
TO命令で位置決めユニットQD75MH1のバッファメモリの
定まられたアドレスに書き込みます。
[ TOP H0 K2000 D5300 K10 ]
TOP:バッファメモリに書き込みする命令
H0:対象の位置決めユニットがスロット0(ゼロ)に挿入されているので
先頭I/Oアドレスが0(ゼロ)なのでH0とする。
K10:バッファメモリアドレスの10からの指定
D5300:D5300を先頭アドレスと指定
K10:10データを指定
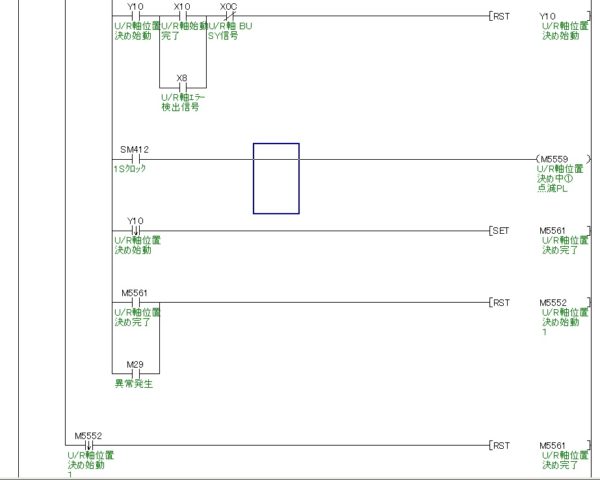
位置決め始動ラダーです。
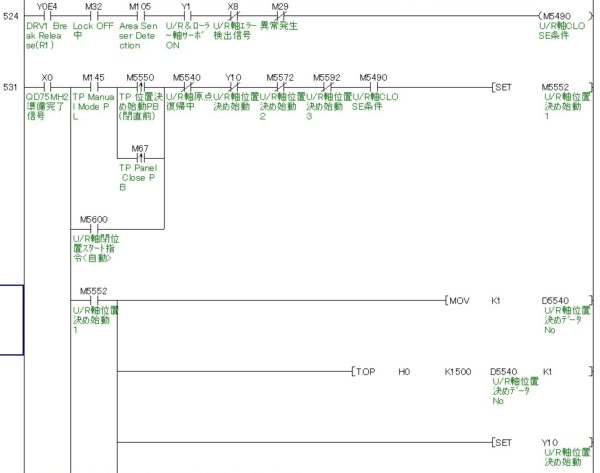
1行目:始動条件です。
2、3行目 M5550,M67:タッチパネルの位置決め始動開始ボタンです。
6行目:[ TOP H0 K1500 D5540 K1 ] (D5540位置決めデータNo=1)
K1500=軸1の位置決めデータNoを書き込むバッファメモリアドレスです。
位置決めデータNoを1に指定
7行目:Y10 位置決め始動指令
8、9行目:位置決め完了または異常発生で位置決め始動指令のリセット
10行目:位置決め稼働中のランプ表示
○軸モニターのラダー
モーターの現在の電流値の取得(リアルタイム表示、更新タイミング1.7ms)
バッファメモリの内容×0.1%
データレジスタ D5550 にモーターの現在の電流値を転送します。

FROM:バッファメモリから読み出しする命令
H0:対象の位置決めユニットがスロット0(ゼロ)に挿入されているので
先頭I/Oアドレスが0(ゼロ)なのでH0とする。
K356:現在の電流値がリアルタイムに格納されている。
D5550:D5550を先頭アドレスと指定
K1:1データを指定
※1
アブソリュート型とは絶対位置検出システムです。
完全に電源がOFFとなっても、バッテリーで現在位置を記憶していますので
原点復帰が不要となるメリットや、サーボOFF時に外的要因でサーボモーター軸が
回されても、位置のカウントは常に(電源OFFでも)監視しカウントがズレル心配が
ありません。
今回解説させて頂きました。参考ラダーですが、実績のあるプログラムで
実際には位置決めNo.3までありますが、今回は位置決めNo.1のみ解説させて
頂きました。
これで三菱サーボモーター制御入門(今回の例 MR-J4)SSCNETⅢラダープログラム編②
の解説を終了させて頂きます。長編にも、かかわらず最後までご覧いただきまして
ありがとうございました。
スポンサーリンク
位置決めユニット(QD75MH)のエラーコードNo.とエラー名一覧
トップページに戻る
当記事は、2022年8月5日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。