スポンサーリンク
キーエンス製SVサーボ 位置決めユニット(KV-ML16V) を使いメカトロリンクⅡ
で制御、接続設定編 実例付で解説
○テスト条件
・シーケンサCPUは KV-3000 を使用。
・パソコンソフトは KV-STUDIO を使用
・極力省配線となる回路とする。
・バッテリー(SV-B1)を搭載し※アブソリュート型とする。
※ページの最後で説明
○ 使用機器の選定
・位置決めユニット:KV-ML16V(最大16軸 MECHATROLINK-II対応)
・サーボアンプ:SV-005L2(50W)
・サーボモーター:SV-M005AS(50Wブレーキ無し)
○サーボアンプの設定(フロントパネルのロータリ-スイッチ)
・局アドレス設定スイッチ 1 に設定(1は第1軸のとき)

| 局アドレス設定スイッチ | 内容 |
| 1 | 第1軸 |
| 2 | 第2軸 |
| 3 | 第3軸 |
| 4 | 第4軸 |
| 5 | 第5軸 |
| 6 | 第6軸 |
| 7 | 第7軸 |
| 8 | 第8軸 |
| 9 | 第9軸 |
| A | 第10軸 |
| B | 第11軸 |
| C | 第12軸 |
| D | 第13軸 |
| E | 第14軸 |
| F | 第15軸 |
| 0 | 第16軸 |
注意点はゼロ『0』は第1軸ではなく、第16軸です。
三菱電機さんのサーボアンプはゼロ『0』は第1軸ですので
間違えない様に注意して下さい。
スポンサーリンク
○ 回路図
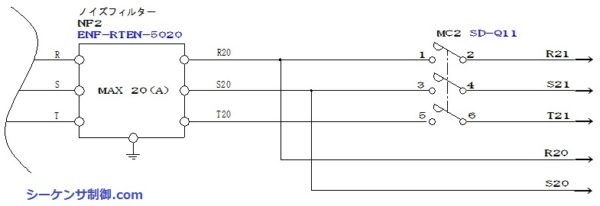
電源回路です。電磁開閉器 MC2 経由で主回路に電源(3相200V)を供給します。
MC2を経由しない方(R20,S20)が制御電源です。(単相200V)
非常停止ボタンを押した場合に電磁開閉器 MC2 が切れる回路とすれば
非常停止 → サーボ動力電源OFFで安全回路を構成できます。
○サーボ回路図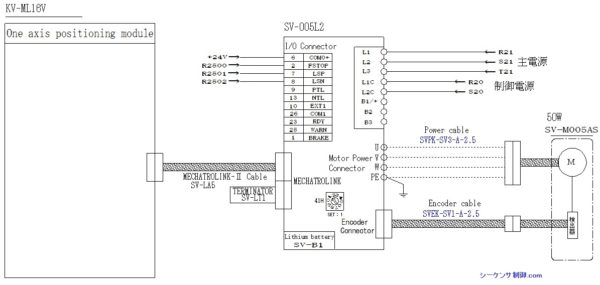
位置決めユニットからサーボアンプに接続されている
バスケーブルはMECHATROLINK-IIです。
極力省配線となる回路としています。
その為、サーボアンプのI/O端子も必要最低限の配線です。
23番端子RDY(レディ)、25番端子WARN(ワーニング)等は
MECHATROLINK-II経由でラダー上で受け取れます。
PLC 出力 R2500 → 2番端子FSTOP
PLC 出力 R2501 → 7番端子LSP
PLC 出力 R2502 → 8番端子LSN
モーターがブレーキ無しなので、ブレーキ回路はありません。
アンプ⇔モーター間のパワーケーブル、エンコーダーけーブル、ブレーキケーブル
の型式はミスミ製の型式です。
位置決めユニット⇔サーボアンプ間がMECHATROLINK-IIですので
かなりすっきりとし省配線です。
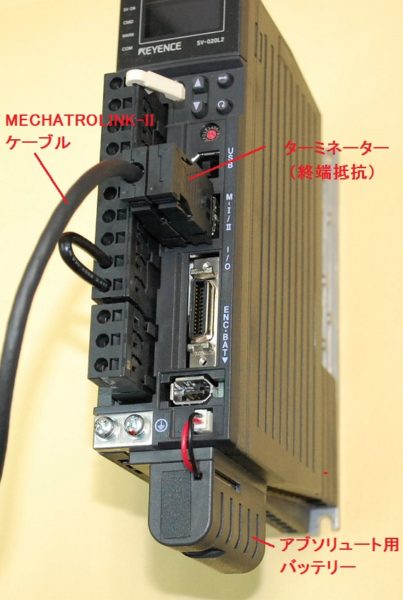
サーボアンプ側は必ずターミネーター(終端抵抗)が必要ですが
KV-ML16V側は終端抵抗内蔵です。
○シーケンサ構成図
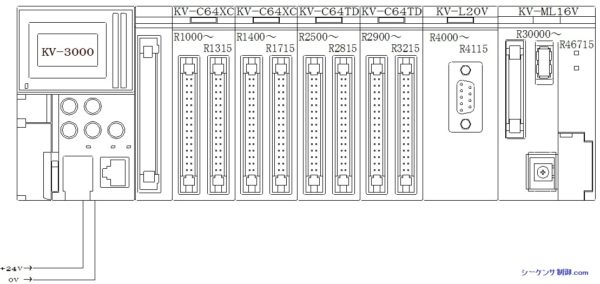
位置決めユニット KV-ML16V は一番最後 (6ユニット目)に配置しています。
アブソリュート型とは絶対位置検出システムです。
完全に電源がOFFとなっても、バッテリーで現在位置を記憶していますので
原点復帰が不要となるメリットや、サーボOFF時に外的要因でサーボモーター軸が
回されても、位置のカウントは常に(電源OFFでも)監視しカウントがズレル心配が
ありません。
これでキーエンス製 SVサーボモーター制御 MECHATROLINK-II
接続設定編 実例付で解説を終了させて頂きます。
この記事の続き パラメータ設定編 は下記のボタンから参照お願い致します。
キーエンス SVサーボモーター制御 MECHATROLINK-II パラメーター編 実例付で解説
スポンサーリンク
トップページに戻る
当記事は、2018年10月3日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。