スポンサーリンク
IAI製ロボシリンダー(コントローラSCON) を三菱シーケンサの
CC-LINKで制御 実際の回路図、ラダープログラムも公開しています。
■今回使用する機器
〇 アクチェータ
型式:RCS4-SA7R-WA-200-8-300-T2-M
RCS4シリーズ SA7Rタイプ WA(バッテリーレスアブソタイプ)
200W リード8mm ストローク 300mm T2 (適応コントローラSCON)
M (ケーブル長さ5M)

〇 コントローラ(CC-LINK接続タイプ)
型式:SCON-CB-200WAI-CC-0-2
SCONシリーズ CB(高機能タイプ) 200W
WAI(バッテリーレスアブソタイプ)
CC (CC-LINK接続タイプ)
0 (ケーブル無し)2 (単相200V)

左:回生抵抗 (REU) 右:コントローラ (SCON)
■回路図
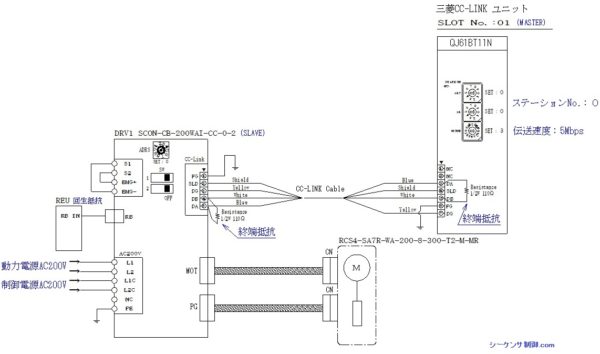
上図の様にCC-LINK接続ですので、凄く省配線です。
コントローラはバッテリーレスなので
バッテリーはありません。
■CC-LINK設定
〇 MASTER側
三菱製CC-LINKユニット
型式:QJ61BT11N
ステーションNo.:0
伝送速度設定:3(5Mbps)
〇 SLAVE側
IAI製コントローラ (SCON)
型式:SCON-CB-200WAI-CC-0-2
CC-LINKの設定はハードスイッチではなく
ソフトでパラメータ設定が必要です。
その為にはパソコン対応ソフト『RCM-101-USB』が
必要です。
RCM-101-USBはパソコンソフト(RC用パソコン対応ソフト)
及び変換器、USBケーブル、専用ケーブルがセットになっています。
RC用パソコン対応ソフトをパソコンにインストールし
パソコンとSCONをケーブルで接続しパラメータを設定します。
■パラメータ設定(SLAVE側SCON)
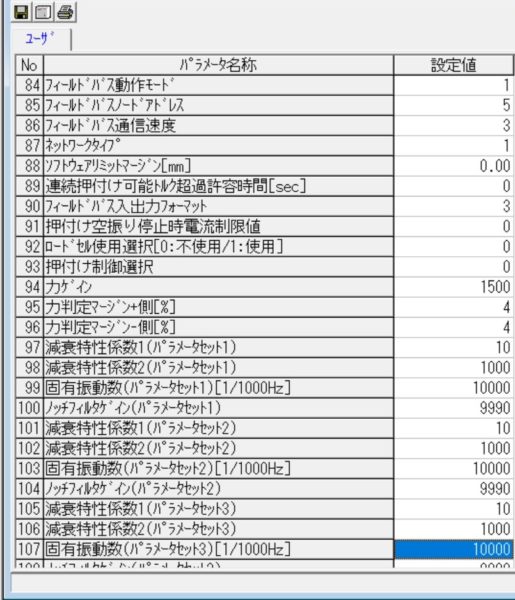
〇 パラメータNo.84(フィールドバス動作モード):1
これは上位(三菱PLC)からの制御方式を5種類から選択できます。
0:リモートI/Oモード
予めコントローラにポジションを登録し、ポジションNo.を上位から指定し
目標のポジションへ移動させるモードです。
1:ポジション/簡易直値モード
予めコントローラにポジションデータ(目標位置以外の速度や加速度等)を登録し
ポジションNo.を上位から指定し、目標位置はその都度、PLCから数値指定する
モードです。
2:ハーフ直値モード
目標位置、速度、加減速度、押付け力を上位PLCより都度
直接数値指定するモードです。
3:フル直値モード
全ての値を都度、上位PLCより直接数値指定するモードです。
4:リモートI/Oモード2
リモートI/Oモードと同じですが、上位PLCへ『現在位置』『電流値』の
2つを数値出力できます。
〇 パラメータNo.85(フィールドバスノードアドレス):5
CC-LINKネットワーク上のコントローラ(SCON)のアドレスを
設定します。
今回は設定値5となっています。SCONの前に4個のCC-LINKI/Oユニット
が実際は存在している為、SCONがノードアドレス5となっています。
上の回路図の様に、SLAVE側はSCONのみの場合は設定値1となります。
〇 パラメータNo.86(フィールドバス通信速度):3
0:156Kbps
1:1625Kbps
2:2.5Mbps
3:5Mbps
4:10Mbps
MASTER側の三菱製CC-LINKユニットの設定と合致している必要が
あります。
■パラメータ設定(MASTER側 三菱PLC)
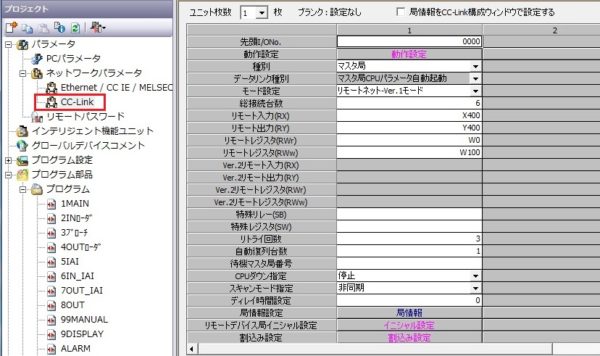
先頭I/O No.:0000
種別:マスタ局
モード設定:リモートネットver.1モード
総接続台数:6
今回はCC-LINK I/Oユニット5台とIAIコントローラ(SCON)1台の合計6台
なので6と設定していますが、上の電気図の様にSLAVE側はSCONのみの場合は
設定値は1となります。
リモート入力(RX):X400
リモート出力(RY):Y400
リモートレジスタ(RWr):W0
リモートレジスタ(RWw):W100
各先頭アドレスを指定します。
記載のない箇所はデフォルト設定のままです。
〇 局情報設定
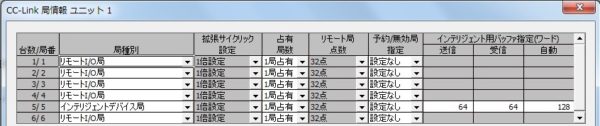
局番1~4と6はリモートI/Oユニットです。
局番5がIAI製コントローラ(SCON)です。
局番5を上図の様に設定します。
局種別:インテリジェンスデバイス局
占有局数:1局占有
リモート局点数:32点
記載のない箇所はデフォルト設定のままです。
スポンサーリンク
■ラダープログラム
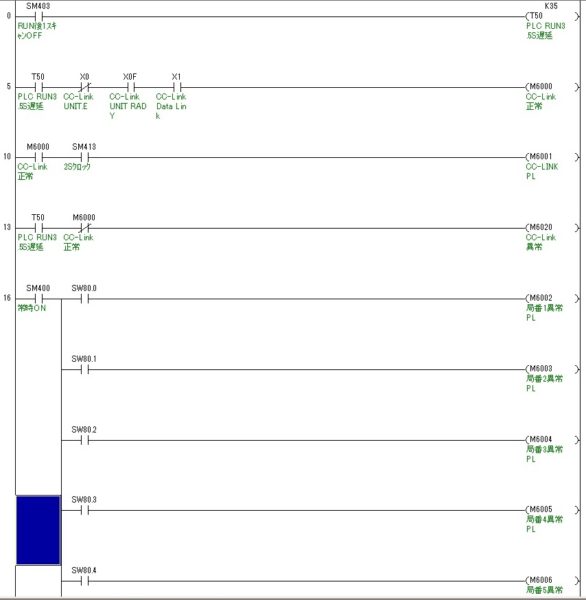
ラダープログラムの説明
2行目 コイル M6000 はCC-LINKが全て正常時にONします。
(CC-LINKユニット QJ61BT11N はベースユニットの先頭に取り付けしています。)
5行目の接点SW80.0は局番1のユニットが異常時にONします。
9行目(一番最後)の接点SW80.4はIAI製コントローラ(SCON)が正常に
CC-LINKと接続されず異常がある場合にONします。
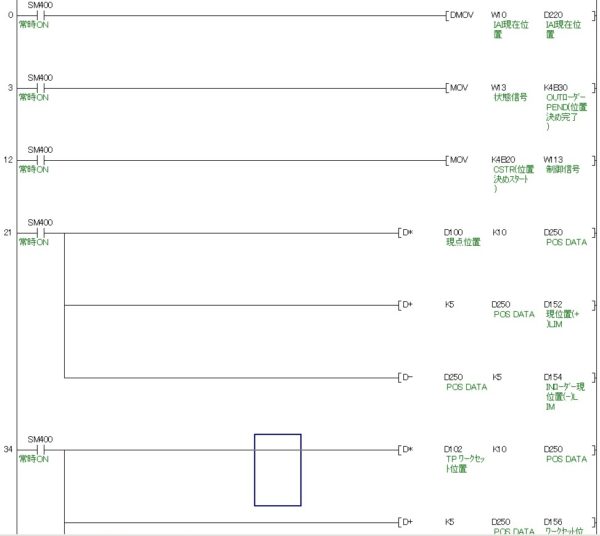
ラダープログラムの説明
1行目 W10にIAIコントローラ(SCON)の現在位置がCC-LINKを通じて
リアルタイムに反映されます。
2行目 W13にIAIコントローラ(SCON)の状態がリアルタイム反映されます。
W13 0ビット目(0):PEND(位置決め完了)
W13 1ビット目(1):HEND(原点復帰完了)
W13 2ビット目(2):MOVE(位置決め中)
W13 3ビット目(3):ALM(アラーム)
W13 4ビット目(4):SV(運転準備完了サーボON)
W13 5ビット目(5):PSFL(押し付け空振り)
W13 6ビット目(6):(使用不可)
W13 7ビット目(7):BALM(アブソバッテリ電圧低下)
W13 8ビット目(8):RMDS(運転モード状態)
W13 9ビット目(9):WEND(ポジションデータ取込完)
W13 10ビット目(A):MODES(教示モード信号)
W13 11ビット目(B):PZONE(ポジションゾーン)
W13 12ビット目(C):ZONE1(ゾーン1)
W13 13ビット目(D):ZONE1(ゾーン2)
W13 14ビット目(E):PWR(コントローラ準備完了)
W13 15ビット目(F):EMGS(非常停止)
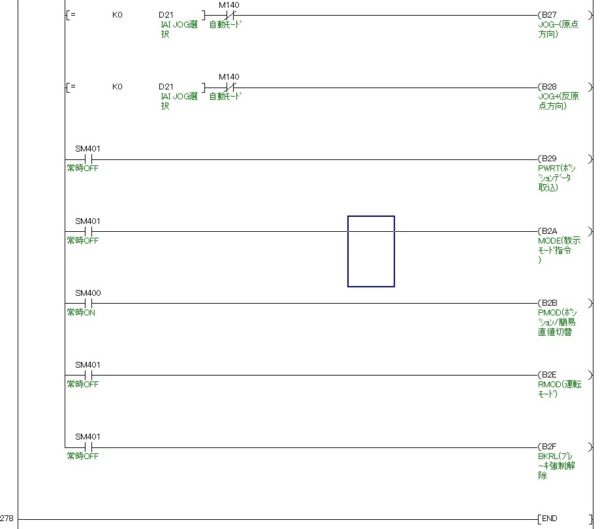
3行目 W113に上位PLCから制御指令をIAIコントローラ(SCON)に
与えます。
W113 0ビット目(0):CSTR(位置決めスタート)
W113 1ビット目(1):HOME(原点復帰)
W113 2ビット目(2):STP(一時停止)
W113 3ビット目(3):RES(リセット)
W113 4ビット目(4):SON(サーボON)
W113 5ビット目(5):JISL(ジョグ/インチング切替)
W113 6ビット目(6):JVEL(ジョグ速度/インチング切)
W113 7ビット目(7):JOG-(原点方向)
W113 8ビット目(8):JOG+(原点方向)
W113 9ビット目(9):PWRT(ポジションデータ取込)
W113 10ビット目(A):MODE(教示モード指令)
W113 11ビット目(B):PMOD(ポジション/簡易直値切替
W113 12ビット目(C):使用不可
W113 13ビット目(D):使用不可
W113 14ビット目(E):RMOD(運転モード)
W113 15ビット目(F):BKRL(ブレーキ強制解除)
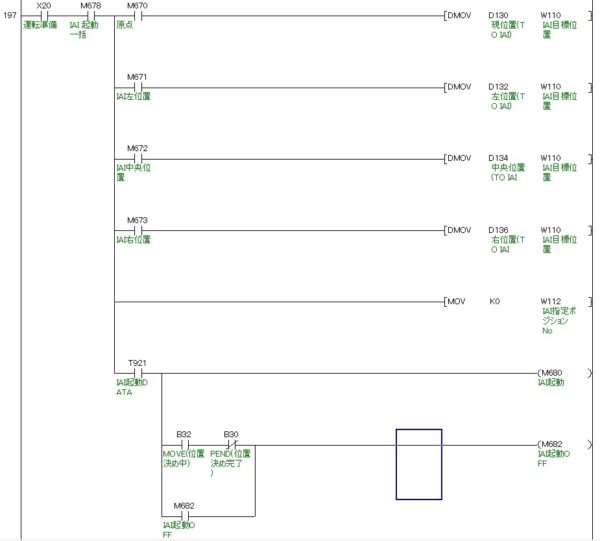
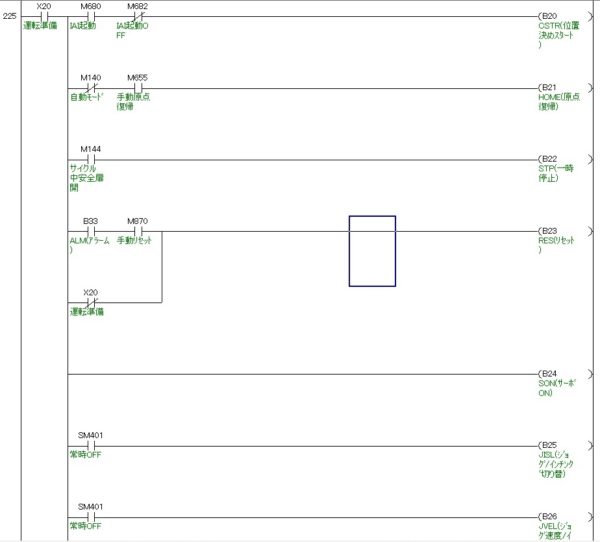
ラダープログラムの説明
M670(原点)、M671(左位置)、M672(中央位置)、M673(右位置)
上記の4位置から移動したい位置を選択しておきます。(接点をONにする)
次にM678(IAI起動一括)にパルスONで位置決めスタートとなるラダーです。
スポンサーリンク
三菱 CC-Link 入門 接続/設定編 三菱 CC-Link 入門パラメータ&ラダー編
トップページに戻る
当記事は、2018年10月1日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。