スポンサーリンク
キーエンス製SVサーボ 位置決めユニット(KV-ML16V) を使いメカトロリンクⅡで制御
ラダープログラム編 実例付で解説
このページは前回公開の
『パラメータ設定編』の続きのページとなります。
パラメータ設定編は下記のページを参照お願い致します。
○テスト条件
・シーケンサCPUは KV-3000 を使用。
・パソコンソフトは KV-STUDIO を使用
・極力省配線となる回路とする。
・バッテリー(SV-B1)を搭載し※アブソリュート型とする。
※ページの最後で説明
○ 使用機器の選定
・位置決めユニット:KV-ML16V(最大16軸 MECHATROLINK-II対応)
・サーボアンプ:SV-005L2(50W)
・サーボモーター:SV-M005AS(50Wブレーキ無し)
○ラダープログラム作成
今回の解説はKV-STUDIOで行います。
まずは、位置決めユニットとCPUの入出力の関係を確認する為
ユニット構成をみます。
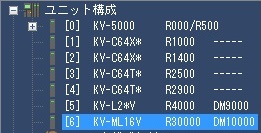
位置決めユニット KV-ML16V はCPUとデータをやり取りする為
下記の制御リレーを使用します。
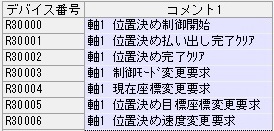
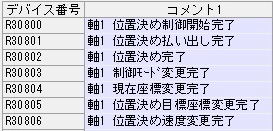

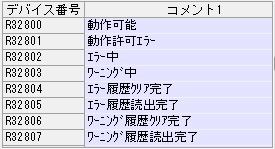
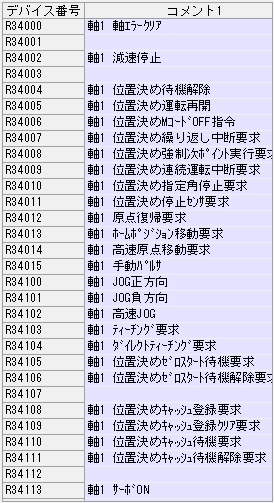

各リレーのコメントは全て予め入力されているので
ありがたいです。
制御リレーの他にバッファメモリも使用しますが
バッファメモりは下記のラダープログラムの
解説欄で確認します。
ここからは実際のラダーソフトを使って解説していきます。
以下はKV-STUDIOの画面です。
ラダープログラムの解説
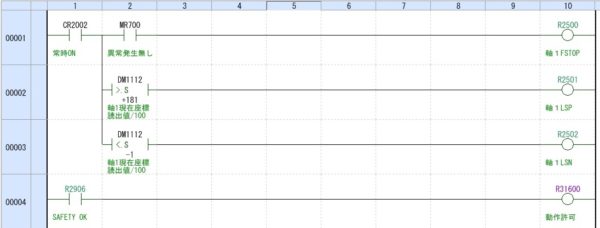
1行目:異常発生無し確認で、FSTOPが解除されます。
2行目:軸1の現在位置が+181以上で LSP (リミット)がかかります。
3行目:軸1の現在位置が-1以下で LSN (リミット)がかかります。
0~+180が可動範囲ということです。
4行目:セーフティが確認されていれば、動作許可となります。
-------------------------------------
ラダープログラムの解説
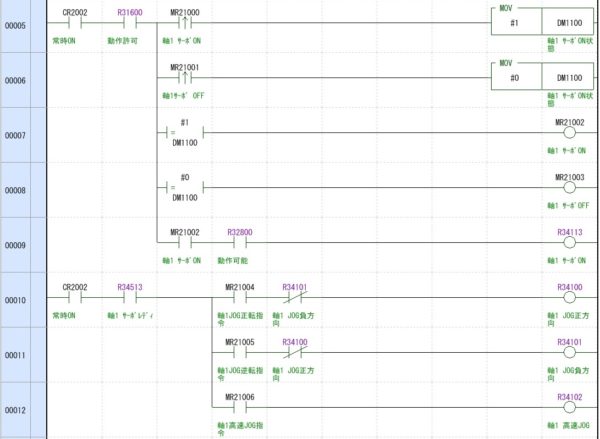
・1行目~5行目はサーボON/OFFする回路です。
サーボON状態のまま電源OFFにした場合は、次に電源ONにした場合は
サーボON状態を記憶しておきたいので、データレジスタ(DM100)に
サーボON/OFF状態を割り付けています。
DM100=1 がサーボON DM100=0 でサーボOFF
・6行目~8行目は JOG動作回路です。
-------------------------------------
ラダープログラムの解説
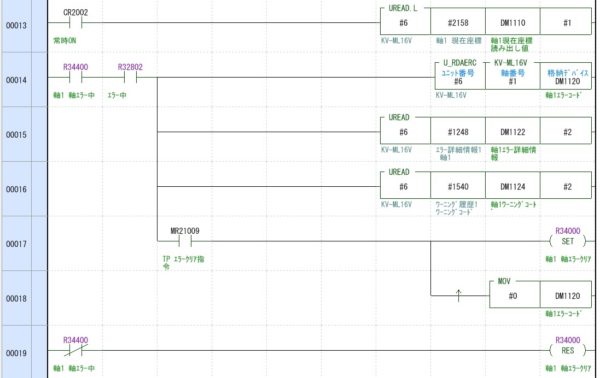
・1行目:軸1の現在座標を読み出しする回路です。
UREAD.L が #6 となっているのは、位置決めユニットKV-ML16Vが
6ユニット目(左から数えて)に配置されているからです。
仮に1ユニット(CPUの右隣)に配置されていれば #1となります。
軸1の現在位置アドレス(数値)はバッファメモリアドレス#2158と#2159に
ダブルワードで格納されています。
現在位置を読み出しする為、バッファメモリ#2158をダブルワードで
DM1110(任意のデータレジスタ)に読み出しします。
・2行目:エラーコードを読み出しする回路です。
エラーコードをDM1120(任意のデータレジスタ)に読み出しします。
・3行目、4行目:同じくエラー詳細情報とワーニングコードを
読み出しする回路です。
・5行目~7行目:エラーリセットする回路です。
スポンサーリンク
-------------------------------------
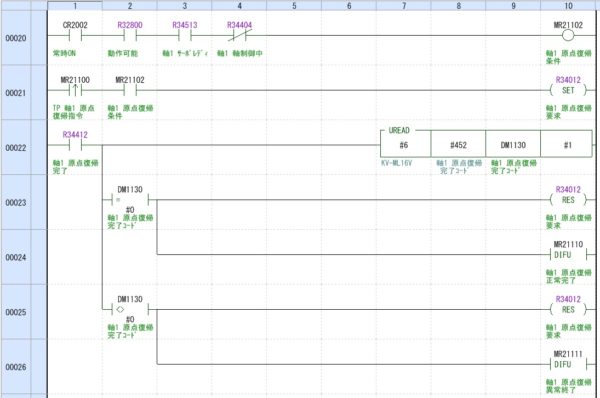

・1行目:原点復帰条件です。
・2行目:原点復帰起動回路です。
・3行目:原点復帰完了時に原点復帰完了コードをDM1130(任意のデータレジスタ)に
読み出しします。
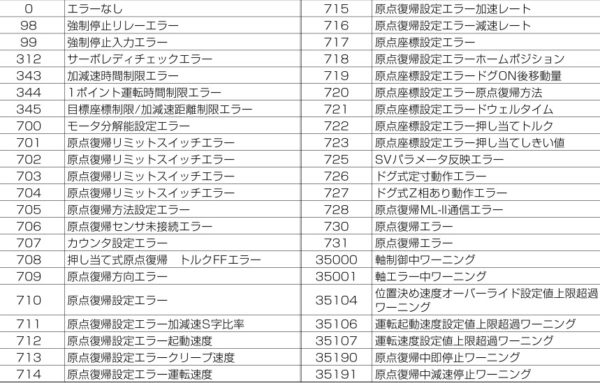
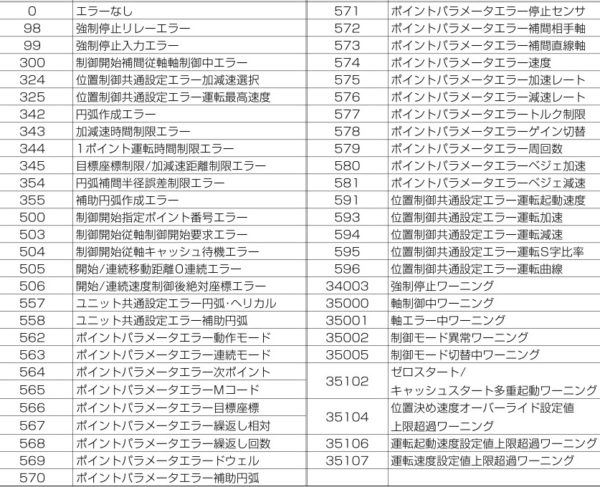
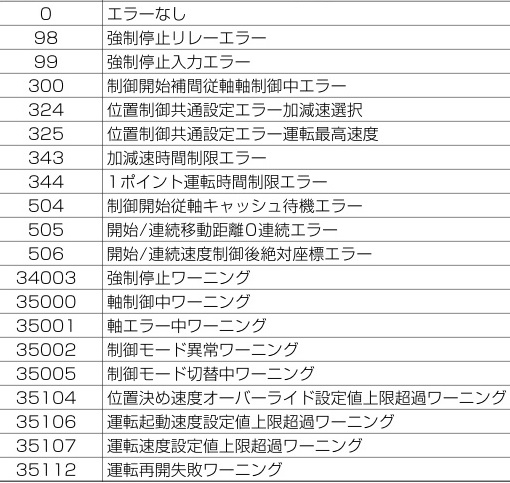
原点復帰完了コードは下記です。
エラーなしの場合は『0』です。
【原点復帰完了コード】
・4行目以降:原点復帰関連の回路です。(簡単な回路ですので解説は省略)
-------------------------------------
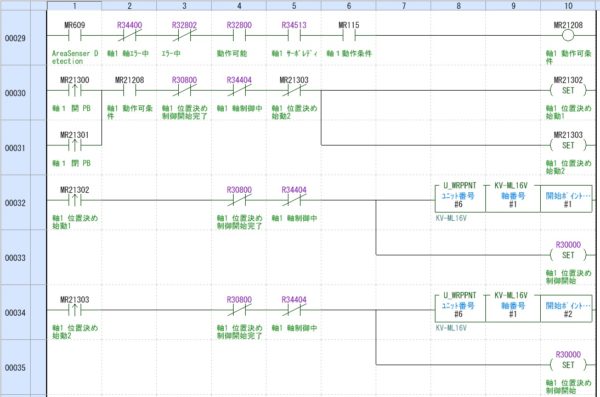
・1行目:サーボ動作条件です。
・2行目、4行目、5行目:位置決め1始動回路です。
・3行目、6行目、7行目:位置決め2始動回路です。
-------------------------------------
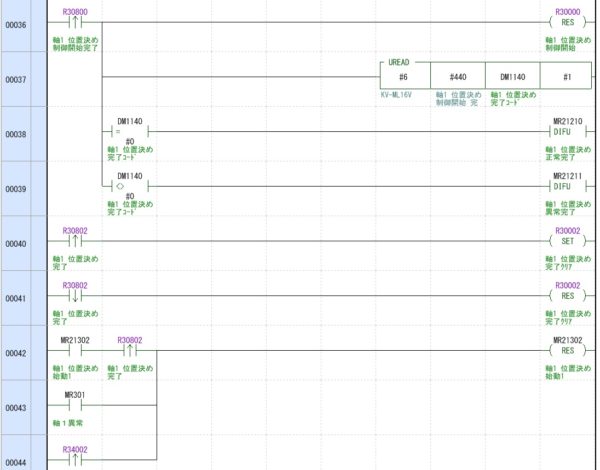
1行目:位置決め完了時、位置決め指令をリセットする回路です。
2行目:位置決め開始完了コードをDM1140(任意)に読み出す回路です。
位置決め開始完了コードは下記です。
エラーなしの場合は『0』です。
【位置決め開始完了コード】
3行目:位置決めが正常終了した場合に正常終了パルスを出す回路です。
4行目:位置決めが異常終了した場合に異常終了パルスを出す回路です。
-------------------------------------
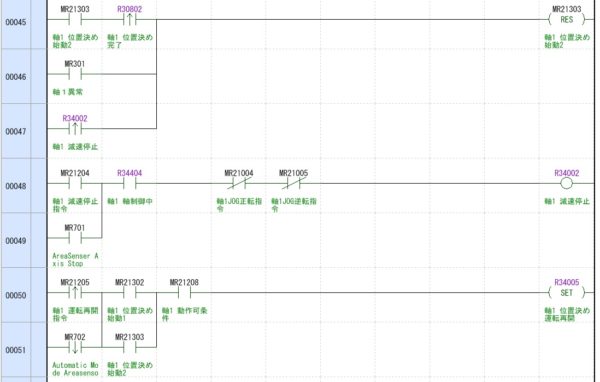
1行目~3行目:位置決め2完了時のリセット回路です。
4行目、5行目:減速停止させる為の回路です。
このラダープログラムの例ではエリアセンサー干渉で減速停止する回路です。
6行目、7行目:減速停止状態から運転再開させる回路です。
-------------------------------------
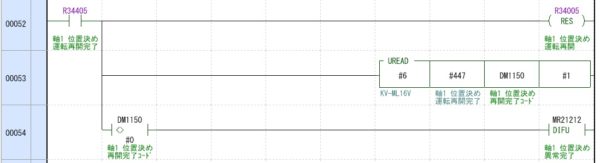
1行目:位置決め再開終了時に位置決め再開指令をリセットする回路です。
2行目:位置決め運転再開完了コードをDM1150(任意)に読み出しする回路です。
位置決め運転再開完了コードは下記です。
エラーなしの場合は『0』です。
【位置決め運転再開完了コード】
3行目:位置決めが異常終了した場合に異常終了パルスを出す回路です。
※1
アブソリュート型とは絶対位置検出システムです。
完全に電源がOFFとなっても、バッテリーで現在位置を記憶していますので
原点復帰が不要となるメリットや、サーボOFF時に外的要因でサーボモーター軸が
回されても、位置のカウントは常に(電源OFFでも)監視しカウントがズレル心配が
ありません。
これでキーエンス製SVサーボ 位置決めユニット(KV-ML16V) を使いメカトロリンクⅡで
制御、ラダープログラム編を終了させて頂きます。
スポンサーリンク
トップページに戻る
当記事は、2018年10月4日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。