スポンサーリンク
三菱サーボモーター制御入門(今回の例 MR-J4)SSCNETⅢパラメータ設定編
実例付で解説致します。
このページは前回公開の
『接続設定編』の続きのページとなります。
結線図やサーボアンプのスイッチ設定などは下記のページを参照お願い致します。
○テスト条件
・シーケンサCPUはQ00UJCPU を使用。
・パソコンソフトはGX-Works2 またはGX-Developerを使用
・極力省配線となる回路とする。
・バッテリー(MR-BAT6V1SET)を搭載し※1アブソリュート型とする。
※1ページの最後で説明
○使用機器の選定
・位置決めユニット:QD77MS2(2軸 SSCNETⅢ対応)
・サーボアンプ:MR-J4-40B(400W 型式の末尾はBはSSCNETⅢ対応)
・サーボモーター:HF-KR43B(400Wブレーキ付)
○パラメータ設定
今回の解説はGX-Works2で行いますが、GX-Developerでも設定できる様に
GX-Works2のインテリジェント機能での設定は使わずに
TO 命令を使いラダープログラムで設定します。
○ラダープログラムの解説
シーケンサの電源が入れば『TOP』命令で
パラメータを位置決めユニットQD77MS2のバッファメモリ
に書き込むプログラムとしています。
○QD77MS2のバッファメモリアドレス表
| バッファメモリアドレス | 項目 |
| 0 | 単位設定 |
| 1 | 単位倍率 |
| 2,3 | 1回転当たりのパルス数 |
| 4,5 | 1回転当たりの移動量 |
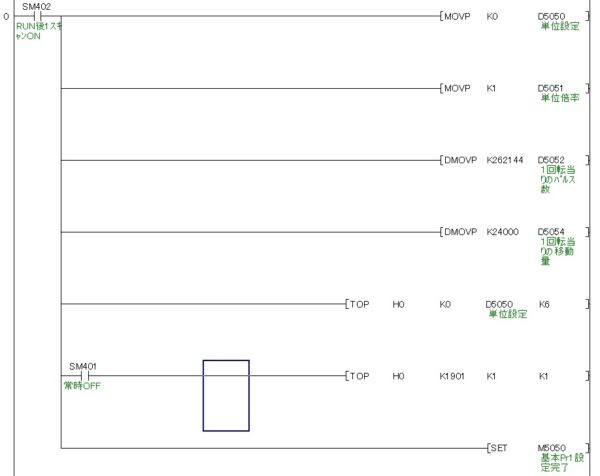
D5050 単位設定:0(単位mm)
D5051 単位倍率:1(1倍)
D5052,D50531回転当たりのパルス数:262144 (32ビットデータ)
D5054,D50551回転当たりの移動量:24000 (32ビットデータ)
以上の6データD5050~D5055 までを一まとめとして
TO命令で位置決めユニットQD75MH1のバッファメモリの
定まられたアドレスに書き込みます。
D5051以降省略させて頂きます。
[ TOP H0 K0 D5050 K6 ]
TOP:バッファメモリに書き込みする命令
H0:対象の位置決めユニットがスロット0(ゼロ)に挿入されているので
先頭I/Oアドレスが0(ゼロ)なのでH0とする。
仮に今回対象の位置決めユニットがスロット1だった場合は
どうなるかですが、スロット0も同じ位置決めユニットで
占有I/O点数が32点だった場合は H2 となります。
K0:バッファメモリアドレスの0(ゼロ)からの指定
D5050:D5050を先頭アドレスと指定
K6:6データを指定
対象の位置決めユニットのバッファメモリの初期化要求です。
位置決めユニットが新品の場合は、この命令は不要ですが
使いまわしの場合は最初1回のみ初期化が必要です。。
その後は削除しても良いですが参考例の様に
常時OFFの接点付きで残しても良いでしょう。
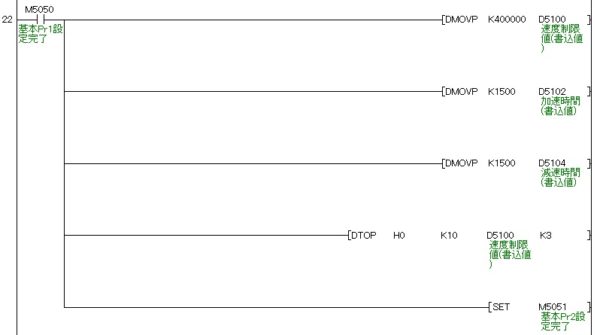
| バッファメモリアドレス | 項目 |
| 10,11 | 速度制限値 |
| 12,13 | 加速時間0 |
| 14,15 | 減速時間0 |
D5100,D5101 速度制限値:400000(32ビットデータ)
D5102,D5103 加速時間0:1500(32ビットデータ)
D5104,D5105 減速時間0:1500(32ビットデータ)
以上の6データD5100~D5105 までを一まとめとして
TO命令で位置決めユニットQD75MH1のバッファメモリの
定まられたアドレスに書き込みます。
D5101以降省略させて頂きます。
[ TOP H0 K10 D5100 K6 ]
TOP:バッファメモリに書き込みする命令
H0:対象の位置決めユニットがスロット0(ゼロ)に挿入されているので
先頭I/Oアドレスが0(ゼロ)なのでH0とする。
K10:バッファメモリアドレスの10からの指定
D5100:D5100を先頭アドレスと指定
K6:6データを指定
スポンサーリンク
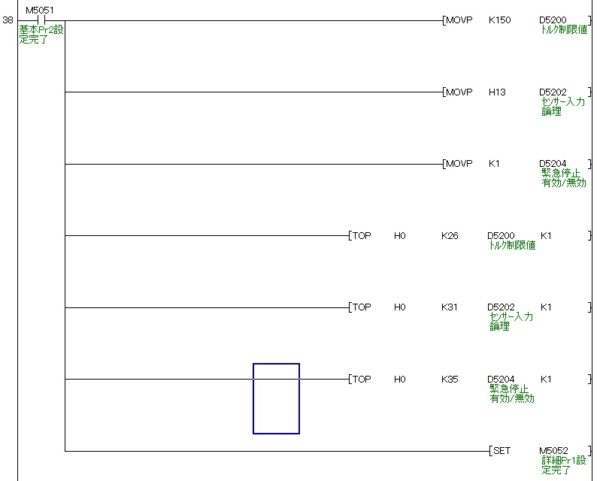
| バッファメモリアドレス | 項目 |
| 26 | トルク制限設定値 |
| 31 | 入力信号論理選択 |
| 35 | 緊急停止有効/無効 設定 |
D5200 トルク制限設定値:150(単位% 1~1000まで設定可)
D5202 入力信号論理選択:13 ※2
D5204 緊急停止有効/無効 設定:1(1=無効 0=有効)
※2 入力信号論理表
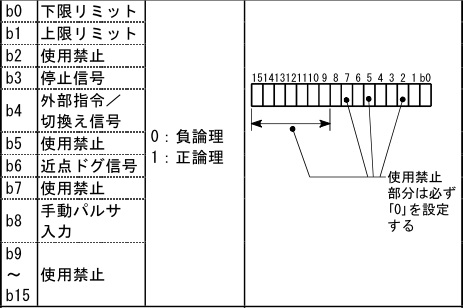
今回下記のみ正論理です。
b0:下限リミット
b1:上限リミット
b4:外部指令切換信号
よって下記の配列となります。
0000000000010011
2進数 10011= 16進数 13
[ TOP H0 K26 D5200 K1 ]TOP:バッファメモリに書き込みする命令
H0:対象の位置決めユニットがスロット0(ゼロ)に挿入されているので
先頭I/Oアドレスが0(ゼロ)なのでH0とする。
K26:バッファメモリアドレスの26からの指定
D5200:D5200を先頭アドレスと指定
K1:1データを指定
以降解説を省略させて頂きます。
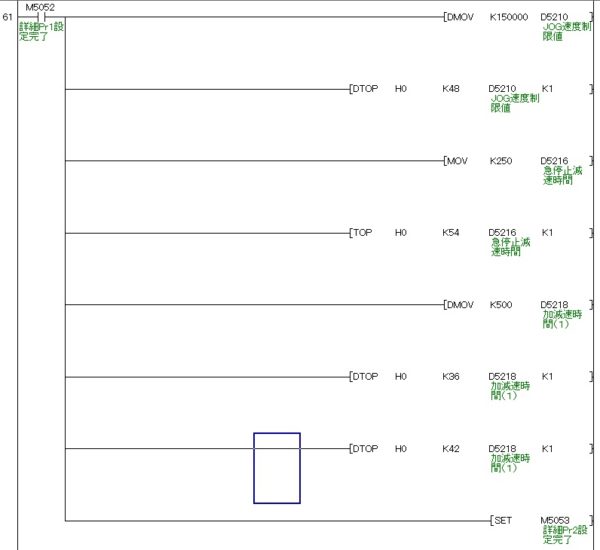
| バッファメモリアドレス | 項目 |
| 48,49 | JOG速度制限値 |
| 54,55 | 急停止減速時間 |
| 36,37 | 加速時間1 |
| 42,43 | 減速時間1 |
D5210,D5211 JOG速度制限値:150000
D5216 急停止減速時間:250(単位:ms)
D5218,D5219 加速(減速)時間:500:(単位:ms)
TOP:バッファメモリに書き込みする命令
H0:対象の位置決めユニットがスロット0(ゼロ)に挿入されているので
先頭I/Oアドレスが0(ゼロ)なのでH0とする。
K48:バッファメモリアドレスの48からの指定
D5210:D5210を先頭アドレスと指定
K1:1データを指定
以降解説を省略させて頂きます。
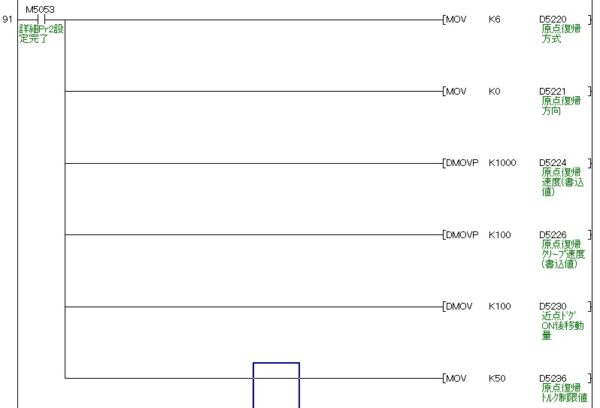
| バッファメモリアドレス | 項目 |
| 70 | 原点復帰方式 |
| 71 | 原点復帰方向 |
| 72,73 | 原点アドレス |
| 74,75 | 原点復帰速度 |
| 76,77 | クリープ速度 |
| 78 | 原点復帰リトライ |
| 80,81 | 近点ドグON後の移動量 |
| 86 | 原点復帰トルク制限値 |
82~85及び87~89にもデータがありますが全て0(ゼロ)で
良いデータですので書き込みを省略しています。
D5220 原点復帰方式:6 (データセット式)
0:近点ドグ式 4:カウント式① 5:カウント式②
D5221 原点復帰方向:0(正方向) 1:負方向
D5222,D5223 原点アドレス:0 (0なので書き込みを省略)
D5224,D5225 原点復帰速度:1000
D5226,D5227 クリープ速度:100
D5228 原点復帰リトライ:0 (リトライなし)(0なので書き込みを省略)
D5230,D5231 近点ドグON後の移動量:100
D5236 原点復帰トルク制限値:50 (単位% 1~1000まで設定可)
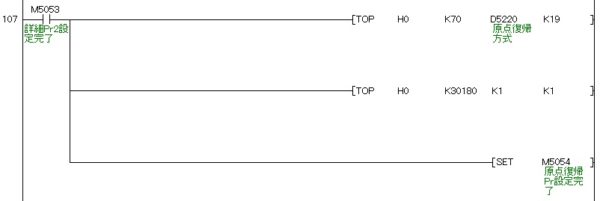
D5221以降省略させて頂きます。 [ TOP H0 K70 D5220 K19 ]
TOP:バッファメモリに書き込みする命令
H0:対象の位置決めユニットがスロット0(ゼロ)に挿入されているので
先頭I/Oアドレスが0(ゼロ)なのでH0とする。
K70:バッファメモリアドレスの70からの指定
D5220:D5220を先頭アドレスと指定
K19:19データを指定
| バッファメモリアドレス | 項目 |
| 30180 | 絶対位置選択時
原点セット条件 0:Z相通過必要 1:Z相通過不要 |
1:Z相通過不要を選択
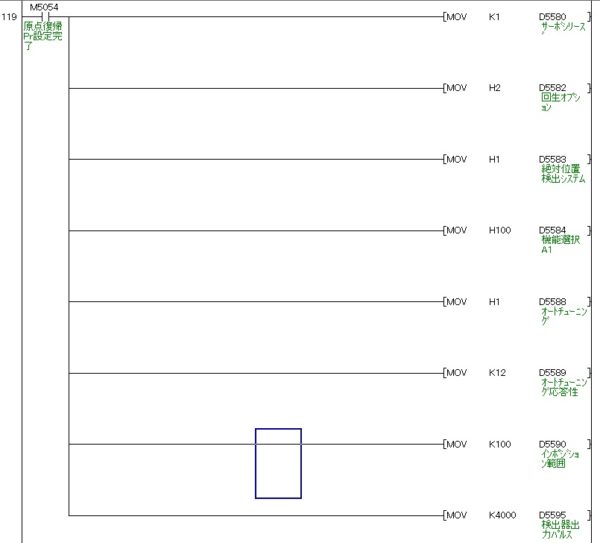
| バッファメモリアドレス | 項目 |
| 30100 | サーボシリーズ |
| 30102 | 回生オプション |
| 30103 | 絶対位置検出システム |
| 30104 | 機能選択A1 |
| 30108 | オートチューニング |
| 30109 | オートチューニング応答性 |
| 30110 | インポジション範囲 |
| 30114 | 回転方向 |
| 30115 | 検出器出力パルス |
30100 サーボシリーズ:1 (MR-J3 Bタイプ)
30102 回生オプション:2 (40Ω 30W 型式MR-032の時)
30103 絶対位置検出システム:1(1:絶対位置を使用 0:使用しない)
30104 機能選択A1:H100
30108 オートチューニング:H1
30108 オートチューニング応答性:12
30110 インポジション範囲:100
30114 回転方向:0 (正方向)(0なので書き込みを省略)
30115 検出器出力パルス:4000
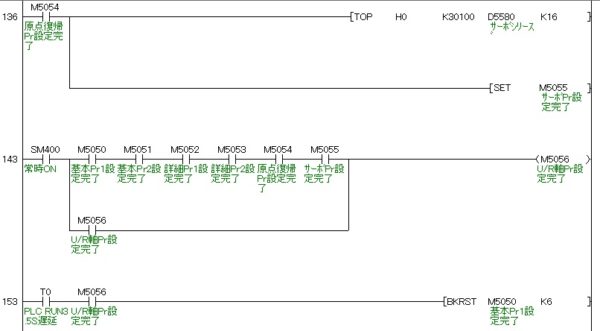
D5581以降省略させて頂きます。 [ TOP H0 K30100 D5580 K16 ]
TOP:バッファメモリに書き込みする命令
H0:対象の位置決めユニットがスロット0(ゼロ)に挿入されているので
先頭I/Oアドレスが0(ゼロ)なのでH0とする。
K30100:バッファメモリアドレスの30100からの指定
D5580:D5580を先頭アドレスと指定
K16:16データを指定
※1
アブソリュート型とは絶対位置検出システムです。
完全に電源がOFFとなっても、バッテリーで現在位置を記憶していますので
原点復帰が不要となるメリットや、サーボOFF時に外的要因でサーボモーター軸が
回されても、位置のカウントは常に(電源OFFでも)監視しカウントがズレル心配が
ありません。
これで三菱サーボモーター制御入門(今回の例 MR-J4)SSCNETⅢパラメータ設定編 の
解説を終了させて頂きます。
この解説の続きとなります、ラダープログラム編①は下記です。
三菱サーボモーター入門 SSCNETⅢラダープログラム編① 実例付スポンサーリンク
トップページに戻る
当記事は、2022年8月5日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。