スポンサーリンク
DENSO(デンソー)製 小型 垂直多関節6軸ロボット VS087をCC-Linkにて
制御しましたので記事にさせて頂きます。
このページではロボットの紹介とCC-Link接続と設定について
記載させて頂きます。

ロボット型式:VS087A4-AV6-NNN-ANNBN-NNN-
コントローラ型式:RC8A-VSA4-NNNM-NI-NNN
ティーチペンダント↓

■主な仕様
| 型式 | VS087 |
| 駆動方式 | ACサーボ6軸(全軸ブレーキ付) |
| 位置検出方式 | アブソリュートエンコーダー |
| 可搬重量 | 7kg |
| 位置繰り返し精度 | ±0.03mm |
| 最大動作領域 | 905mm |
| 本体重量 | 51kg |
| 耐環境性 | IP67 |
■コントローラの仕様
| 制御軸数 | 6軸 |
| 使用言語 | デンソーロボット言語(PacScript) |
| 教示方式 |
1:リモートティーティング |
| メモリ容量 | ユーザ領域:1.75MB ファイル領域:400MB (5000ステップ相当×256ファイル) |
| ティーチペンダント | 7.5″TFTカラーLCD
非常停止釦付き IP65 |
| 外形寸法 | 369mm(W) x 490mm(D) x 173mm(H) |
| 質量 | 約10kg |
| 電源仕様 | 3相 AC200
単相 AC200 |
| 対応フィールドバス
(オプション) |
DeviceNet Ethernet/IP
PROFIBUS PROFINET CC-Link など |
| 外部通信 | RS-232C:1回線 イーサネット:1回線USB:2回線 |
↓コントローラ

○ コントローラ標準搭載のI/Oボートの配線
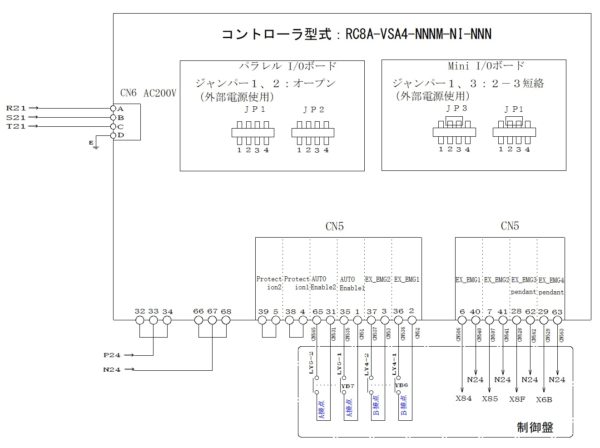
2番と36番及び3番と37番は非常停止の配線です。
非常停止を接続しない場合は短絡します。
1番と35番及び31番と65番は外部モード/内部モードの切り替えの配線です。
今回は外部電源DC24Vを設けて接続しています。
○ CC-Link接続について
シーケンサからの制御をI/Oのみでも可能ですが
やはり点数が多く、配線が多くなるのが嫌で
CC-Link接続を選択しました。
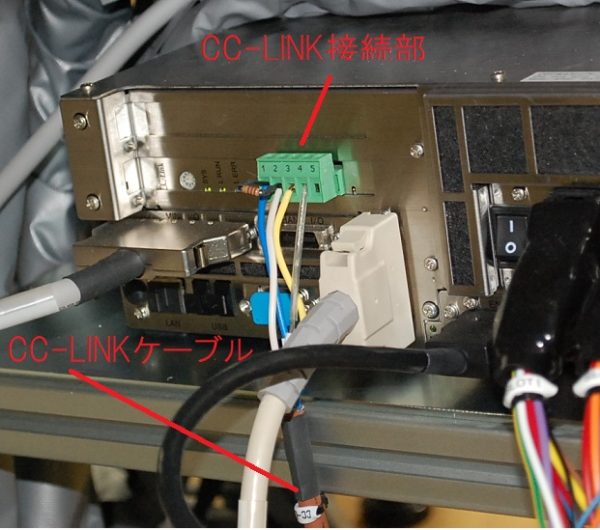
CC-Link接続したい場合はオプションでCC-Linkボードを
購入する必要があります。
コントローラに装着済みで受け取りました。
今回制御で使用するシーケンサは三菱製QCPUなので
シーケンサ側のCC-LinkユニットはQJ61BT11Nです。
コントローラ裏面↓
■CC-Linkの配線図
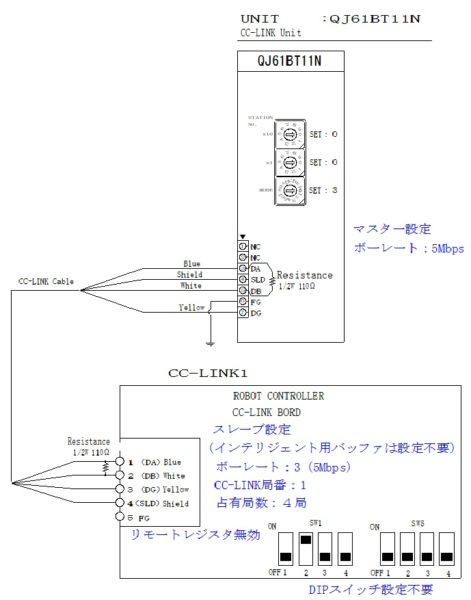
シーケンサ側のCC-Linkがマスター側としロボット側がスレーブとして
設定しました。
占有局数:4局固定
局種別:インテリジェントデバイス
(インテリジェント用バッファは設定不要)
ボーレート:5Mbps
スレーブノード番号(CC-LINK局番):1
CC-Link設定の詳細は下記のページを参照お願い致します。
三菱 CC-Link 入門 接続/設定編 三菱 CC-Link 入門パラメータ&ラダー編スポンサーリンク
○ CC-LinkのI/O割り付け
CC-Linkの接続と設定が終わりましたら、次はI/O割り付けです。
ティーチペンダントから『RC3互換モード』を選択しましたので
割付表は下記となります。
○ 設定一覧(ロボット側から見た入力)
CC-Linkのシーケンサ側アドレスは Y1000番~割り付けます。
(PLC側のネットワークパラメータで Y1000~を指定)
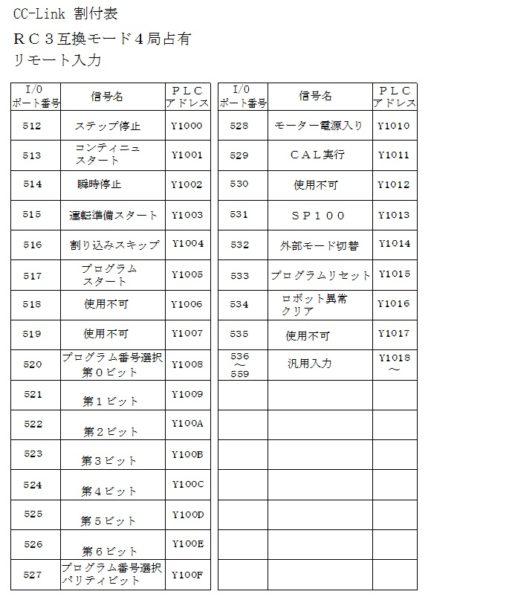
512~はロボット側の入力番号です。
Y1000~はシーケンサ側の出力番号です。
上の表は 512 (ステップ停止) に シーケンサ出力 Y1000 が割り当てています。
○ 設定一覧(ロボット側から見た出力)
CC-Linkのシーケンサ側アドレスは X1000番~割り付けます。
(PLC側のネットワークパラメータで X1000~を指定)
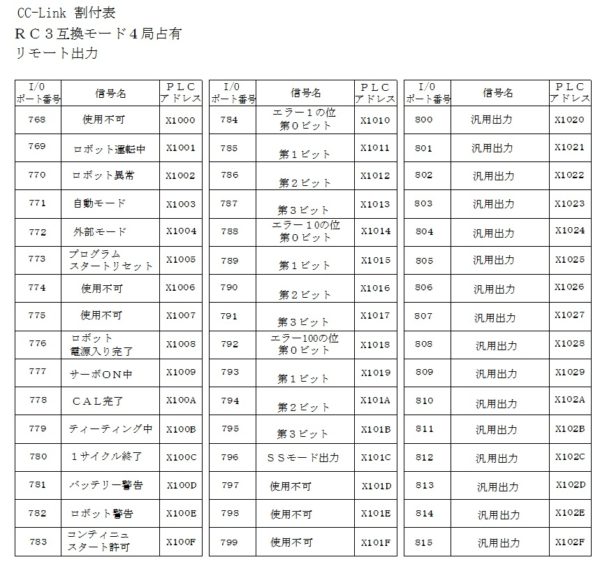
768~はロボット側の出力番号です。
X1000~はシーケンサ側の入力番号です。
上の表は 769 (ロボット運転中) に シーケンサ入力 X1001 が割り当てています。
これでDENSO(デンソー)製 小型 垂直多関節6軸ロボット VS087をCC-Link制御
についての解説を終了させて致します。
最後までご覧いただきましてありがとうございました。
この記事の続き(シーケンスラダー編)は下記のリンクをクリック
お願いします。
スポンサーリンク
トップページに戻る
当記事は、2020年11月6日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。