スポンサーリンク
不二越(NACHI)製 小型6軸ロボット MZ07(MZ07L)をCC-Linkにて
制御しましたので記事にさせて頂きます。

このページではロボット制御のシーケンスソフト(ラダー)について
記載させて頂きます。
ロボットの紹介とCC-Link接続、設定について
下記リンクのページで記載しています。
CC-Link で制御(接続編)にて記載致しましたが
ロボットと制御側のシーケンサ(PLC)がCC-Link接続
されています。
青色のケーブルがCC-Linkケーブルです。

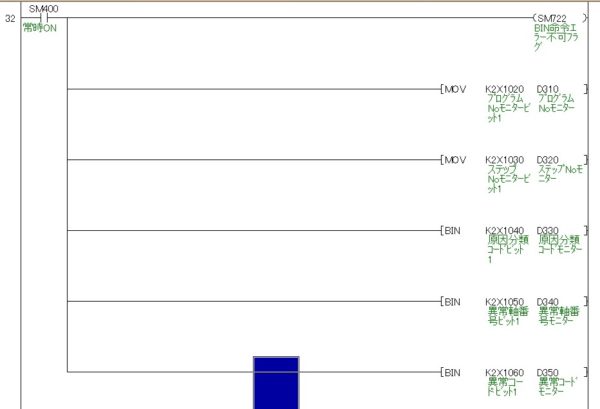
【シーケンスラダープログラムの解説】
ロボットからBCDコードで出力される各データを
シーケンサのデータレジスタに読み出すラダーです。
————————————————————————————
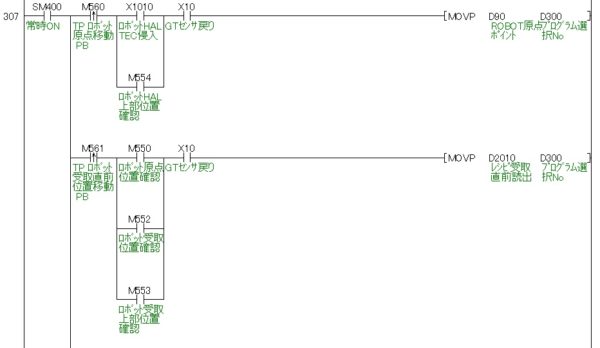
シーケンサ起動時にロボットの状態を確認する
ラダーです。
ロボットの起動が確認されたら(M500のON)タッチパネルの画面
を切り換えています。

————————————————————————————
レシピに格納されているロボットの各移動ポイント番号を
移動用ラダーのデータレジスタ(D300)に読み出すラダーです。
スポンサーリンク
ロボットの起動条件のラダーです。

————————————————————————————
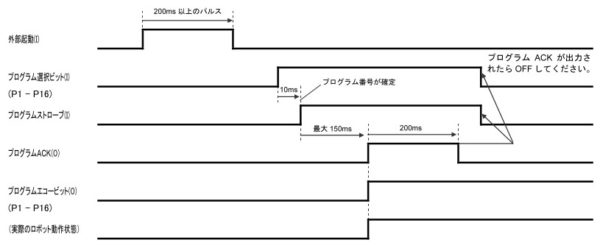
ここからがロボットを起動させるプログラムになります。
まずタイミングチャートを下記に示します。
このタイミングで信号を出せば、ロボットが
起動します。
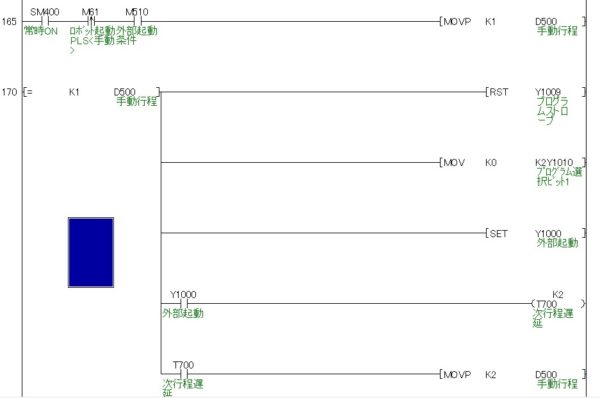
下図のラダーの解説です。
M51↑の接点がタッチパネル上の起動釦です。
起動条件(M510)がONであれば、M51のONが
受付られて、データレジスタD500が1になり
ラダープログラムが下方向に進みます。
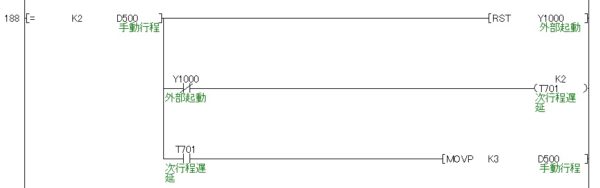
Y1009とY1010のリセットは念の為、ラダーの最初で
リセットしています。
SET Y1000 からがプログラムの開始です。
Y1000がONになれば、D500に2が書き込まれラダーが
次に進みます。
上のラダーでY1000をONにしましたが
今度はY1000をOFFにします。
0.2秒だけONにしたということです。
(パルスを出しました。)
Y1000がOFFになれば、D500に3が書き込まれラダーが
次に進みます。
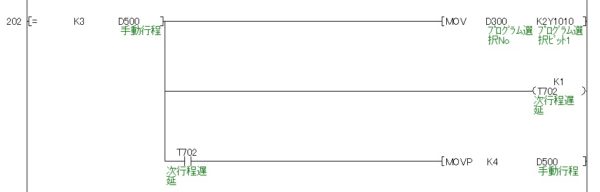
上のラダーで取得したD300に格納されている起動用プログラム番号を
ロボットの起動用プログラム番号のI/OにBCDで転送します。
D500に4が書き込まれラダーが次に進みます。
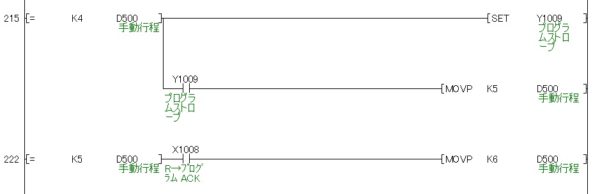
Y1009(プログラムストローブ)をONにします。
Y1009がONになれば、ロボットがX1008をONにしてきます。
X1008(ACK)がONになれば実際にロボットが起動します。
X1008がONになれば、D500に6が書き込まれラダーが
次に進みます。
Y1010とY1009をリセットしています。
リセットされれば、D500に7が書き込まれ
このロボットの手動起動ラダーは終了します。
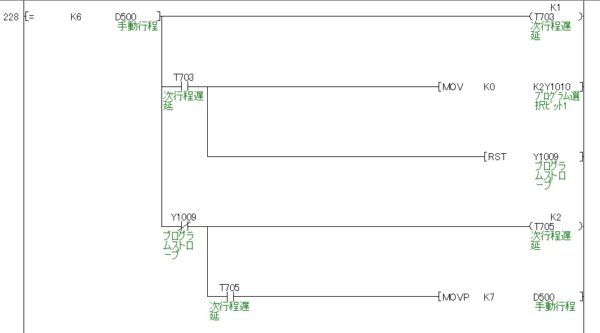
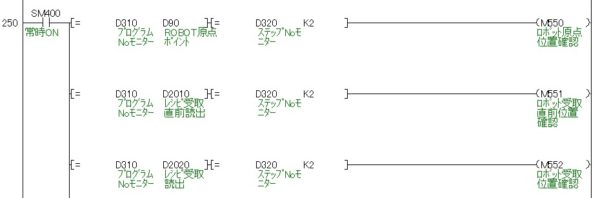
ロボットが実際にどの位置にいるのか確認している
ラダーです。
これで不二越(NACHI)製 小型6軸ロボット MZ07(MZ07L)をCC-Link制御
シーケンスラダー編の解説を終了させて頂きます。
最後までご覧いただきましてありがとうございました。
スポンサーリンク
当記事は、2018年1月28日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。