スポンサーリンク
キーエンス製SVサーボ 位置決めユニット(KV-ML16V) を使いメカトロリンクⅡで制御
パラメータ設定編 実例付で解説
このページは前回公開の
『接続設定編』の続きのページとなります。
結線図やサーボアンプのスイッチ設定などは下記のページを参照お願い致します。
○テスト条件
・シーケンサCPUは KV-3000 を使用。
・パソコンソフトは KV-STUDIO を使用
・極力省配線となる回路とする。
・バッテリー(SV-B1)を搭載し※アブソリュート型とする。
※ページの最後で説明
○ 使用機器の選定
・位置決めユニット:KV-ML16V(最大16軸 MECHATROLINK-II対応)
・サーボアンプ:SV-005L2(50W)
・サーボモーター:SV-M005AS(50Wブレーキ無し)
○パラメータ設定
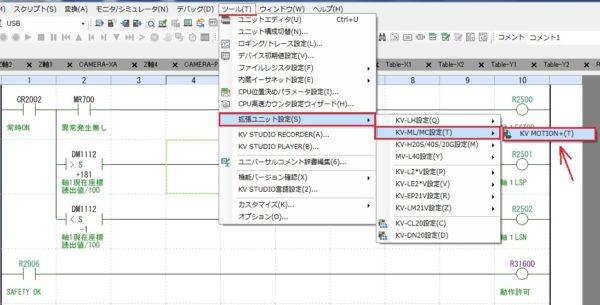
パラメータ設定はKV-STUDIOの付属ツール KV-MOTION+ で行います。
下記の手順で起動します。
KV-STUDIOの上部タグから『ツール』⇒『拡張ユニット設定』⇒『KV-ML/MC設定』⇒
⇒『KV-MOTION+』
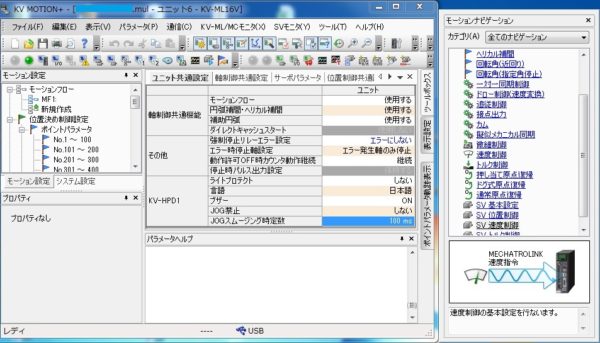
KV-MOTION+ が起動しますと下記の画面となります。
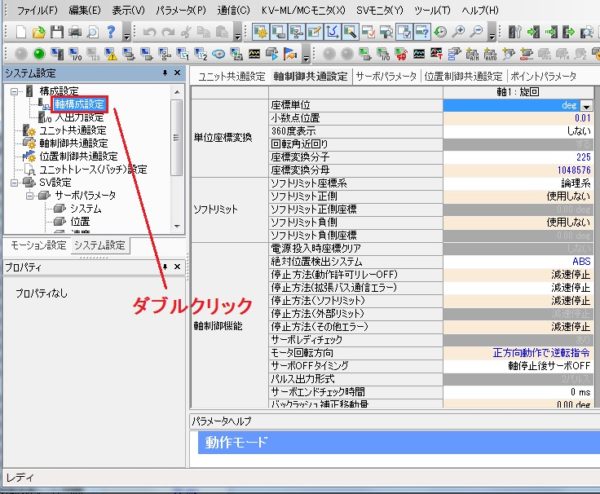
〇 軸構成設定
始めに『構成設定』の『軸構成設定』をダブルクリックします。
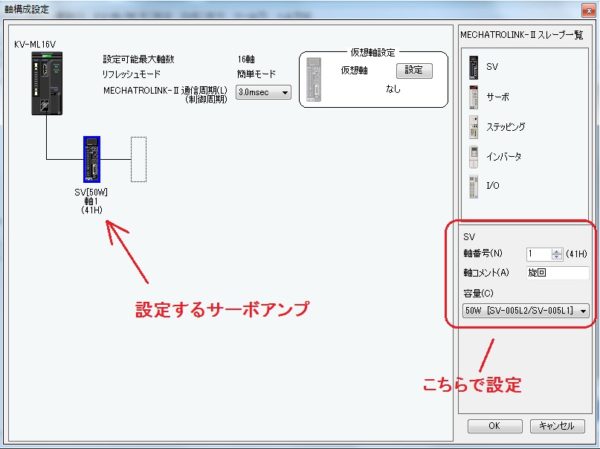
軸構成設定で画面右側の赤枠内の項目を設定します。
・軸番号 今回1を設定します。
・コメント 任意のコメント追加できます。
・容量 プルダウン方式でサーボモーターの容量を設定します。 今回50Wです。
設定終了で右下の (OK) を押します。
スポンサーリンク
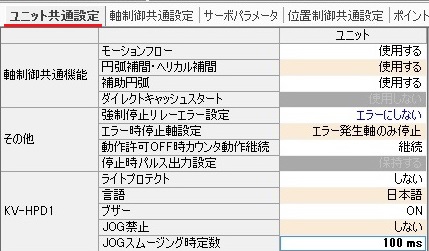
〇 ユニット共通設定
『ユニット共通設定』をクリックします。
必要に応じ設定します。
今回設定したのは、その他 → 強制停止リレーエラー設定のみです。
デフォルトの (エラーにする)⇒ (エラーにしない)に変更しました。
その他はデフォルトのままです。
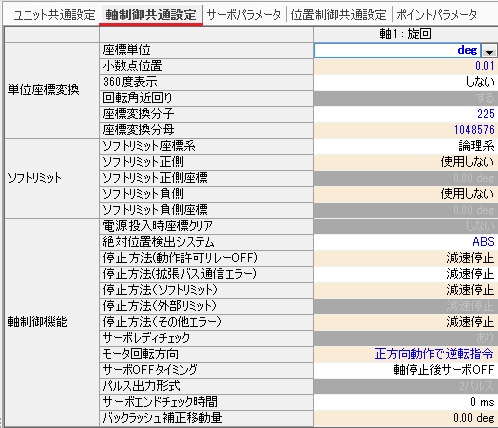
〇 軸制御共通設定
『軸制御共通設定』をクリックします。
こちらも必要に応じ設定します。
サーボアンプにアブソリュート(絶対位置制御)用バッテリーを取付
ましたので、(絶対位置検出システム)の設定は ABS を選択します。
〇 サーボパラメータ
『サーボパラメータ』を選択します。
こちらも必要に応じ設定します。


〇 位置制御共通設定
『位置制御共通設定』をクリックします。
こちらも必要に応じ設定します。

〇 ポイントパラメータ
『ポイントパラメータ』をクリックします。
一番上の1行 No.1 が軸1の位置決めNo.1です。
・動作モード 絶対位置又は相対位置などの選択です。
・目標位置 目標座標です。
・速度 動作速度です。

※1
アブソリュート型とは絶対位置検出システムです。
完全に電源がOFFとなっても、バッテリーで現在位置を記憶していますので
原点復帰が不要となるメリットや、サーボOFF時に外的要因でサーボモーター軸が
回されても、位置のカウントは常に(電源OFFでも)監視しカウントがズレル心配が
ありません。
これでキーエンス製SVサーボ 位置決めユニット(KV-ML16V) を使いメカトロリンクⅡ
で制御 パラメータ設定編 実例付で解説を終了させて頂きます。
この記事の続き ラダープログラム編 は下記のボタンから参照お願い致します。
キーエンス SVサーボモーター制御 MECHATROLINK-II ラダープログラム編 実例付で解説
スポンサーリンク
トップページに戻る
当記事は、2018年10月3日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。