スポンサーリンク
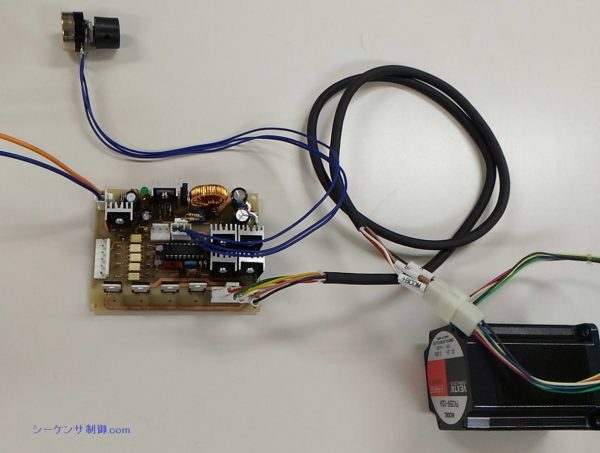
自作のPICマイコン基板で2相ステッピングモータードライバーを製作しましたので
紹介と解説をさせて頂きます。
なぜ製作しようと思ったかですが、ボリューム調整(可変抵抗)で回転数を制御できる
安価なドライバーが無かった為です。
今回駆動基板を作製するターゲットとしましたのが下記のオリエンタルモーターの
2相ステッピングモーター 型式:PK268-02Aです。
定価\8100円と安価で2相なので駆動回路も簡単です。

■PK268-02Aの仕様
|
2相/5相
|
2相
|
|---|---|
|
取付角寸法
|
56.4mm
|
|
タイプ
|
標準
|
|
結線方式
|
ユニポーラ6本リード線
|
|
軸タイプ
|
片軸
|
|
接続ケーブルタイプ
|
リード線方式
|
|
励磁最大静止トルク
|
1.35N・m
|
|
ローター慣性モーメントJ
|
480×10-7kg・m2
|
|
減速比
|
–
|
|
基本ステップ角度
|
1.8°
|
|
定格電流
|
2A/相
|
|
電圧
|
4.5V
|
|
巻線抵抗
|
2.25Ω/相
|
|
モーター部 質量
|
1kg
|
■回路図
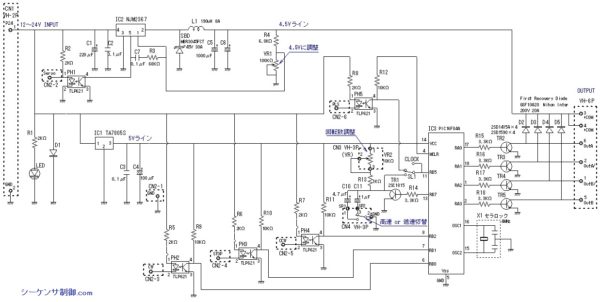
上図では見にくいので下記をクリックして下さい。
PICマイコンのPIC16F84Aを使った回路です。
PIC16F84Aは非常に安価で入手性も良いです。
1個200円程度で購入できたと思います。
○ 回路説明
・電源回路
供給電源は12V~24V程度です。
DC-DCコンバータICのNJM2367を使ってモーター電源の4.5Vまで降圧させています。
モーターが変り駆動電圧が変わって対応出来る様にしました。VR1で電圧を調整できます。
この回路で5Aまで駆動できます。
PICマイコン用の5Vは3端子レギュレターICのTA7805を使って5Vまで降圧させています。
供給電源が24Vの場合降圧分の電圧が大きく発熱が気になりますが、PICマイコンの
消費電流が低いので、発熱の問題ないレベルでした。
・各動作(サーボOFF、停止(サーボON)、正転、逆転)
回路図を見て頂ければ解ると思いますが、フォトカプラの1番端子をグランドに落とせば
動作します。(シーケンサーの出力で動作させる為にこの回路としました。)
セレクトスイッチSL1を下側で使えば、VRで回転数が調整できます。
セレクトスイッチSL1を上側に切り替えれば、外部からパルスを入れて使えます。
(フォトカプラPH5の2番端子にトランジスタ出力で)
スポンサーリンク
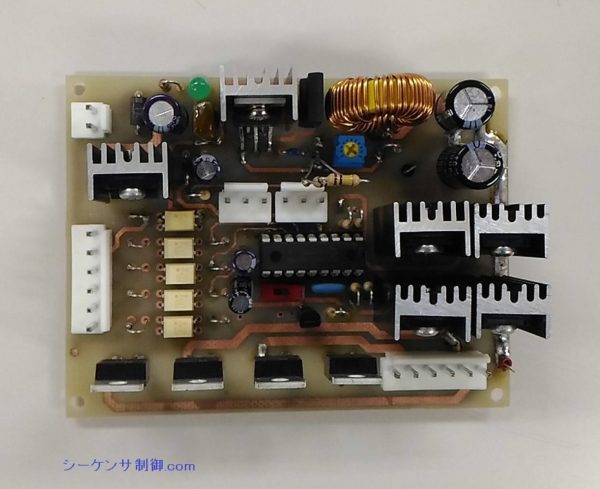
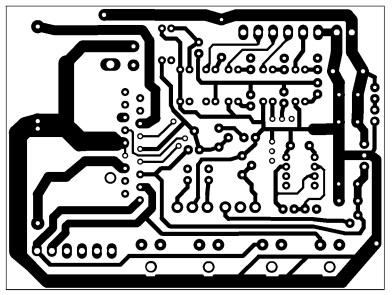
○プリント基板
今回、基板設計はフリーソフトの『PCBE』を使いました。
PCBEを使うのは今回が初めてでしたが、無料ソフトとは思えない程
使いやすく良くできたソフトでした。
ソフトがEXE型なのでインストール不要で使えるのが良かったです。
部品面
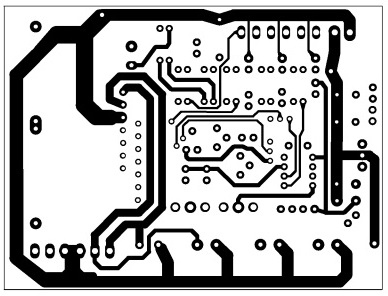
ハンダ面
基板データやPICマイコンのソフト(Hexデータ)が欲しい方はページ上部の
【お問い合わせ】からご連絡下さい。
これで自作でPICマイコン基板(2相ステッピングモータードライバー)を製作の解説を終了させて頂きます。
最後までご覧いただきましてありがとうございました。
スポンサーリンク
トップページに戻る
当記事は、2017年1月10日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。