スポンサーリンク
三菱FXシーケンサ (今回の例 FX3UC)RS232Cでキーエンス製MVサーボを制御
ラダープログラム編 実例付きで解説致します。
この解説ではラダープログラムを紹介させて頂きます。
このページは①接続編と②パラメータ設定編に続く③ラダープログラム編のページです。
接続編は下記です。
三菱FXシーケンサ RS232Cでキーエンスサーボを制御 接続編パラメータ設定編は下記です。
三菱FXシーケンサ RS232Cでキーエンスサーボを制御 パラメータ設定編○使用機器の選定
・シーケンサCPUはFX3UCを使用
・シーケンサ側RS232CユニットはFX3UC-232ADPを使用
・キーエンス製サーボアンプ:MV42
・キーエンス製サーボモーター:MV-B40(ブレーキ付400W)
三菱シーケンサ FX3UCでラダープログラムの作成します。
今回はGX-Works2を使用しました。
下記に実際のプログラムを紹介させて頂きます。
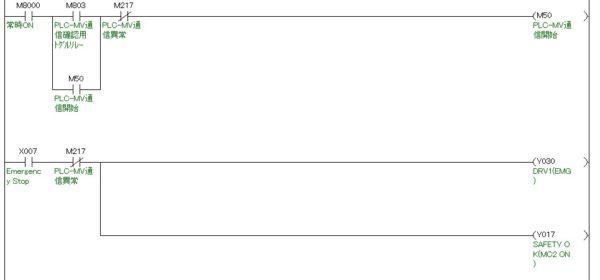
コイルM50は通信確認です。
M803はキーエンスMVサーボとの通信で通信が正常なときON/OFFを繰り返す
リレーです。
通信異常が発生すると非常停止となるラダーです。
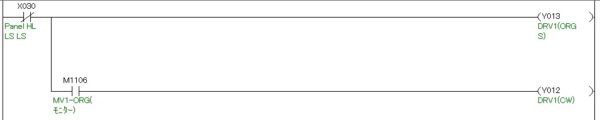
原点復帰に必要な回路です。

アラーム発生でスタート信号をリセットする回路です。
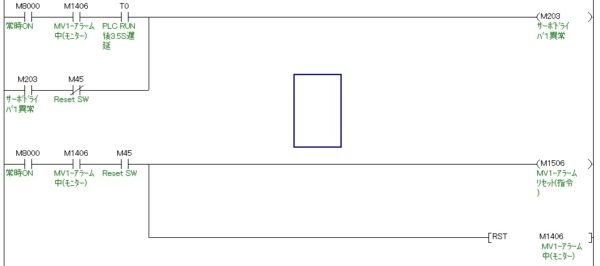
アラーム発生の回路とアラームをリセットする回路です。
○ここから原点復帰プログラムです。
データレジスタを使ったステップ制御 (工程歩進制御) を使用しています。
ステップ制御の詳細は下記のページで紹介しています。
QCPU/FX共通データレジスタでステップ制御
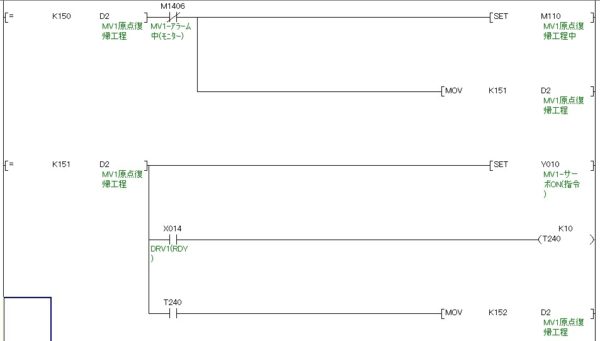
原点復帰ボタンが押されるとデータレジスタD2に150が書き込まれ
上記のプログラムに接続されます。(原点復帰ボタンは回路上にありませんが)
工程151番でサーボONとなります。
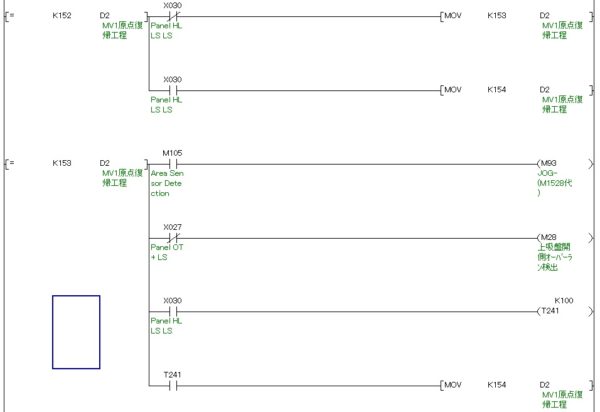
工程152番のX30はセンサーで原点のすぐ近くにあるセンサーです。
原点センサー付近にいる場合と遠いところにいる場合で原点復帰方法を分けています。
原点センサー付近にいる場合は工程153番にそうでない場合は工程154番に工程が進みます。
工程153番では原点センサー付近からJOG運転で原点センサーから遠ざける回路です。
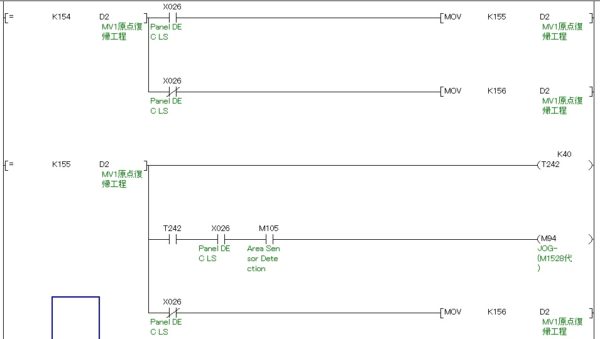
工程154番のX26は減速センサーで原点センサーのすぐ近くにあるセンサーです。
このセンサーで動作を分けています。
減速センサーを検知している場合は工程156番へ
減速センサーを検知していない場合は工程155番へ
工程155番ではJOG運転で減速センサーを検知するまでJOG動作します。
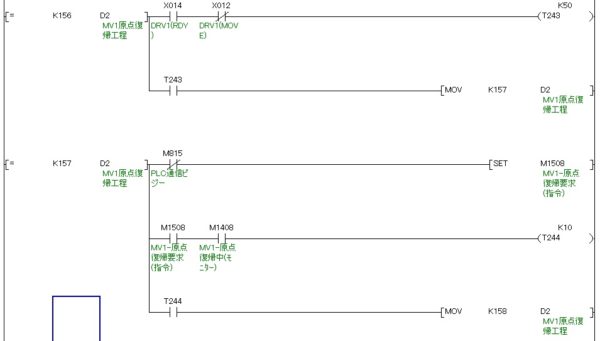
工程156番ではレディ確認
工程157番では原点復帰要求を出します。
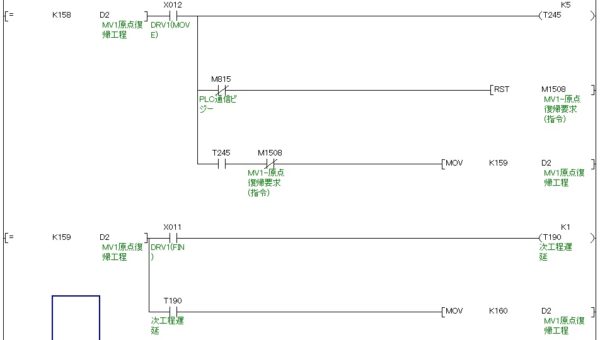
工程158番は動作確認です。
工程159番は位置決め完了信号確認です。
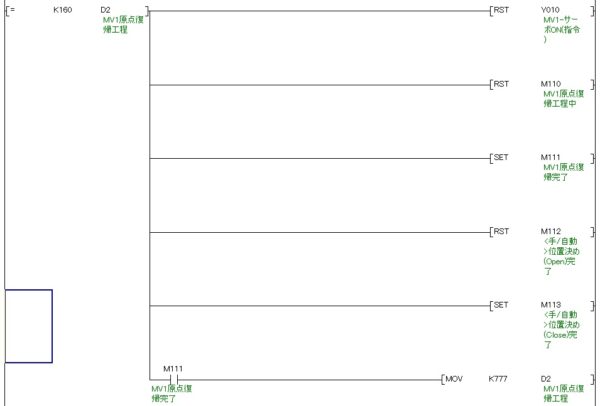
工程160番ではサーボOFFとその他の信号をOFFにする回路です。
スポンサーリンク
○ここからは起動回路(通常位置決め回路)です。
X4が起動スタート指令ボタンです。
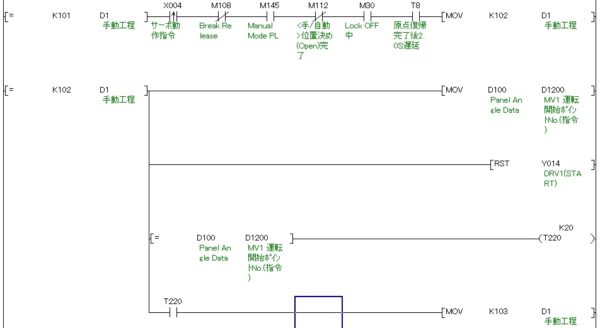
X4が押されインターロックがOKであればデータレジスタD1に102が書き込まれ
工程102番に進みます。
工程102番では運転ポイントNo(位置決めポイント)の書き込みと
念の為、スタート信号Y14のリセットです。
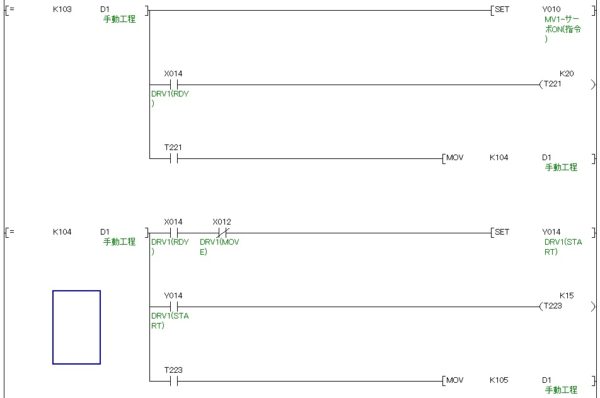
工程103番ではサーボON指令です。
工程104番では位置決めスタート指令です。
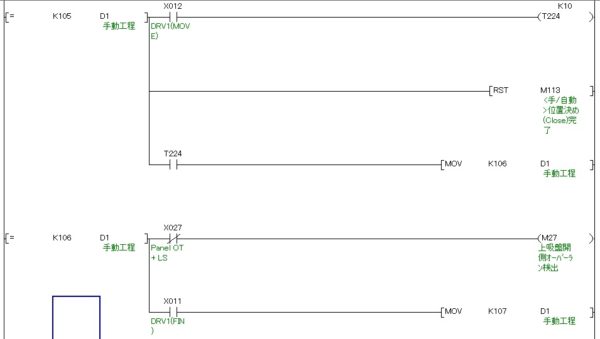
工程105番ではサーボモーターの動作確認です。
106番ではオーバーランではない確認と位置決め終了確認です。
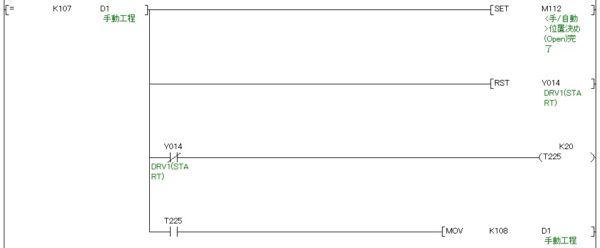
工程107番ではスタート指令のリセットです。
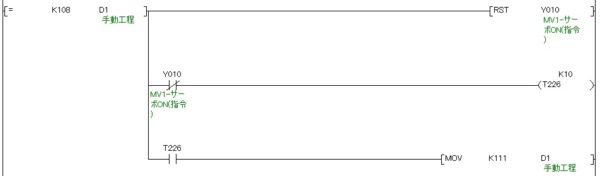
工程108番ではサーボOFF指令で終了です。
これで三菱FXシーケンサ RS232Cでキーエンス製MVサーボを制御
ラダープログラム編の解説を終了させて頂きます。
最後までご覧頂きましてありがとうございました。
スポンサーリンク
トップページに戻る
当記事は、2016年11月6日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。