スポンサーリンク
三菱FXシーケンサ (今回の例 FX3UC)RS232Cでキーエンス製MVサーボを制御
パラメータ編 実例付きで解説致します。
○使用機器の選定
・シーケンサCPUはFX3UCを使用
・シーケンサ側RS232CユニットはFX3UC-232ADPを使用
・キーエンス製サーボアンプ:MV42
・キーエンス製サーボモーター:MV-B40(ブレーキ付400W)
回路図や結線などの詳細は下記のページで解説しています。
三菱FXシーケンサ RS232Cでキーエンスサーボを制御 接続編○三菱シーケンサとの接続条件
・FX3UC-232ADP とサーボアンプMV42 を RS232C接続する。
・主な信号のやり取りはRS232Cで行うが、非常停止などブレーキなどの
数点の信号は有線でのやり取りとする。
○サーボアンプ:MV42のパラメータ設定を行います。
サーボアンプ MV42へのパラメータの転送には専用ケーブルが必要です。
ケーブルの詳細やパソコンとの接続の詳細は下記のページで解説しています。
キーエンスのサーボ設定用ソフト『SERVO BUILDER』を使用します。
SERVO BUILDERを起動します。
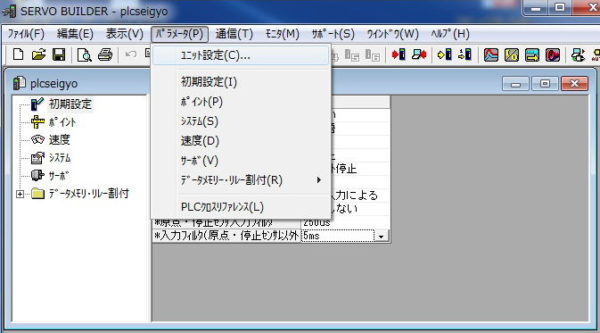
まずは、ユニット設定からです。
上部タグの『パラメータ』→『ユニット設定』をクリックします。
ユニット設定が開きます。
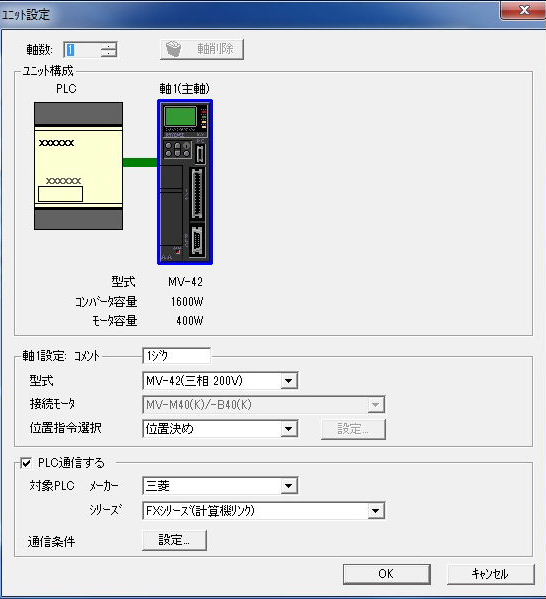
軸設定:1軸
型式:MV-42(三相200V)
位置指令選択:位置決め
PLC通信するにチェックを入れる
対象PLC メーカー:三菱
シリーズ:FXシリーズ(計算機リンク)
通信条件の『設定』をクリックします。
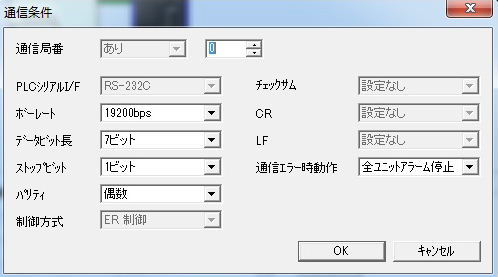
通信条件が開きます。
ボーレート:19200bps
データビット長:7ビット
ストップビット:1ビット
パリティ:偶数
通信エラー時動作:全ユニットアラーム停止
『OK』をクリックします。
ユニット設定画面に戻りますので再度『OK』をクリックします。
初期設定を確認します。
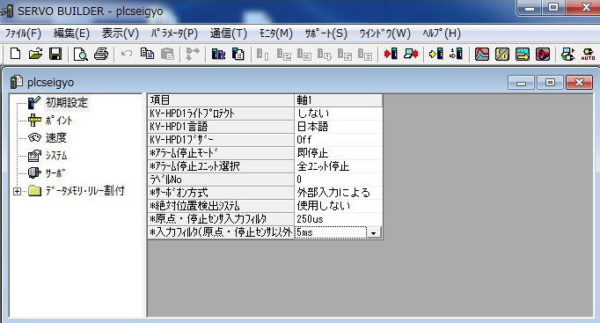
今回デフォルトのままです。
ポイントの設定です。

今回はポイントNo1~No6まで使用しています。
位置指令方式、目標座標、速度No、連続動作モード、次ポイントNoのみ
設定しています。
位置指令方式は相対位置か絶対位置かの設定です。
目標座標は上記が絶対位置なので、絶対位置を設定します。
速度Noは次の項で解説します、速度Noを設定します。
連続動作モードの『連続2』は目標座標に到達した後、停止せず『次ポイント』で
設定した『目標座標』まで連続で移動します。但し『次ポイントNo』の設定が
『0』の場合は次ポイントへは行きません。
次ポイントNoは連続動作モードの設定で連続を設定している場合の次(2番目)の
移動ポイントです。
位置No5に行った場合のみ連続して位置No6に行く設定です。
速度設定です。
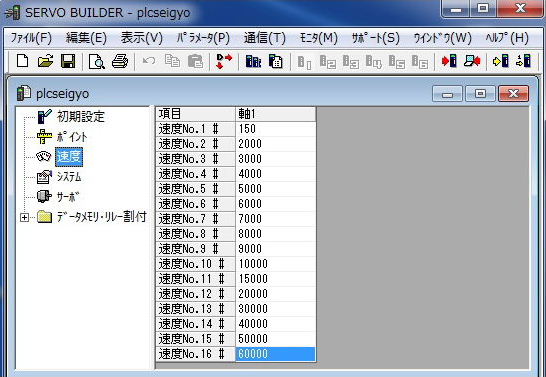
今回速度Noは、No1、No8、No 9 しか使用していませんが、ここでは
遅い順でNo1~No16まで設定しています。
システム設定です。
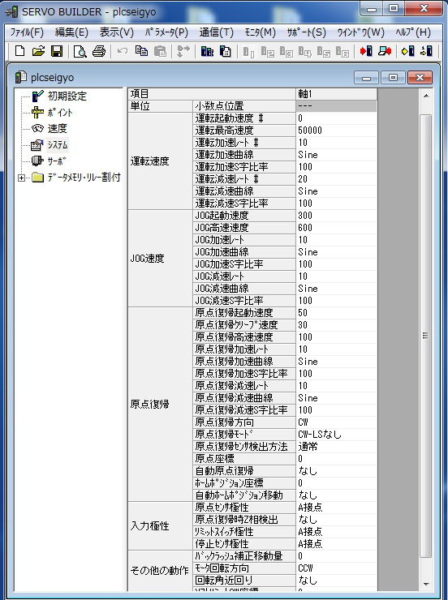
モーターの運転速度や回転方向や、センサーの極性など必要に応じて設定します。
今回の設定は上図の設定です。
サーボ設定です。
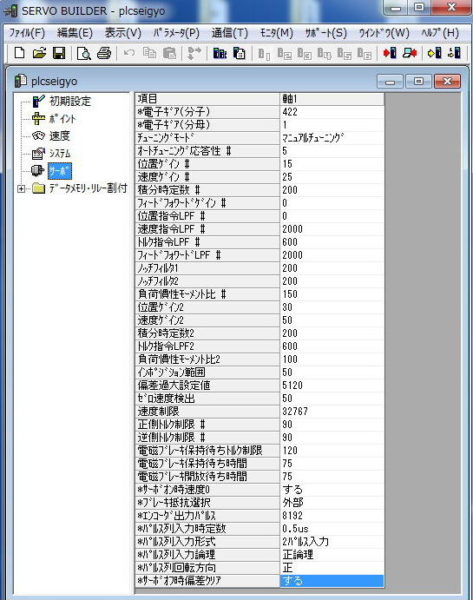
こちらでは電子ギアの設定をします。
電子ギア(分子)の数値を調整しました。
チューニングは今回マニュアルで位置ゲイン、速度ゲイン、負荷慣性モーメント比など
を調整しました。
スポンサーリンク
データメモリ・リレー割付です。共通のフレーム交信です。
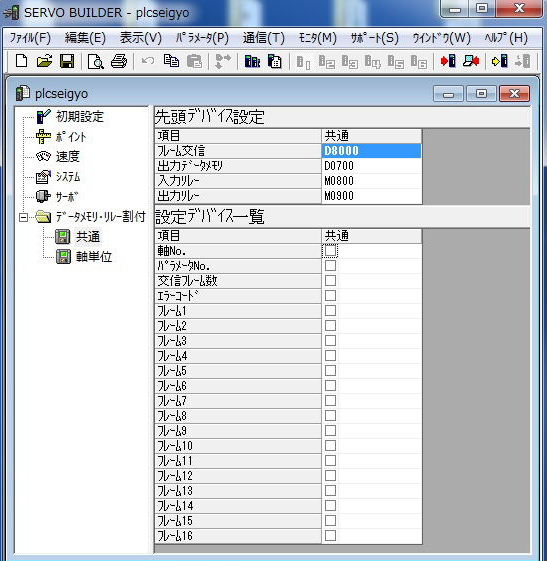
設定項目なしです。
共通の出力データメモリです。
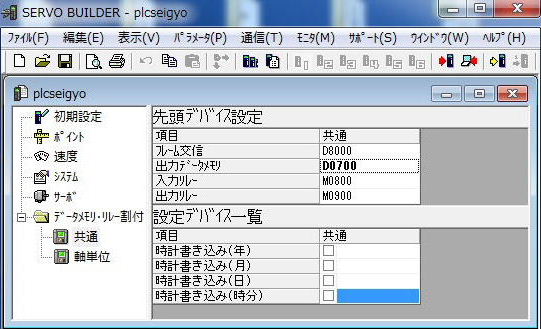
設定項目なしです。
共通の入力リレーです。
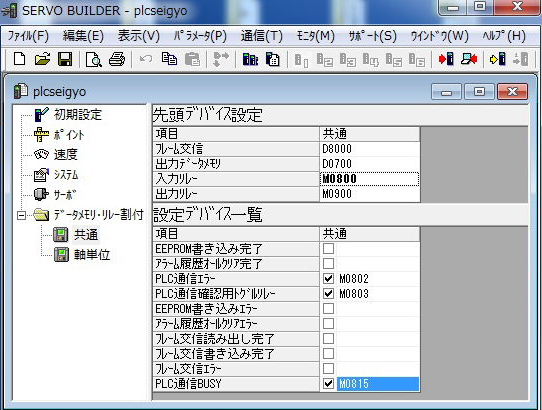
M800番を設定し『PLC通信エラー』、『PLC通信確認用トグルリレー』
『PLC通信BUSY』にチェックを入れています。
共通の出力リレーです。
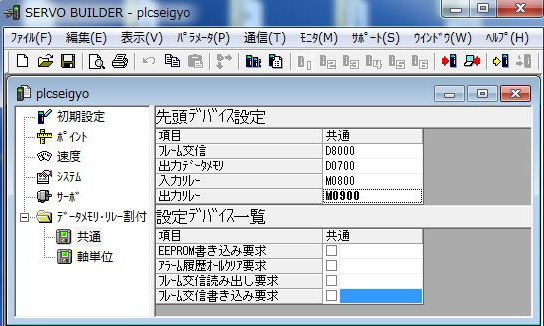
設定なしです。
軸単位の入力データメモリです。
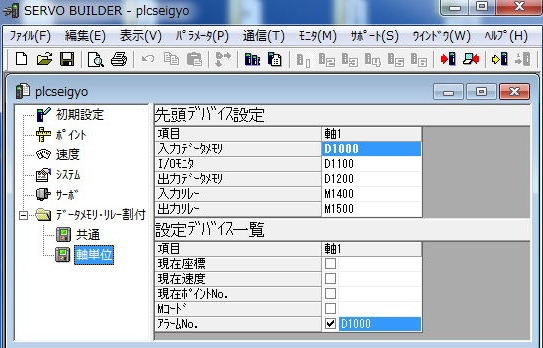
D1000番を設定し『アラームNo』のみチェックしています。
軸単位のI/Oモニタです。
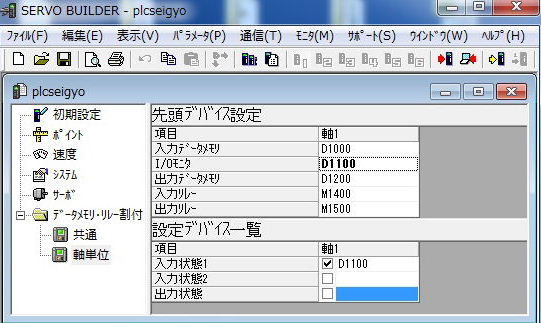
D1100番を設定し『入力状態1』のみチェックしています。
軸単位の出力データメモリです。
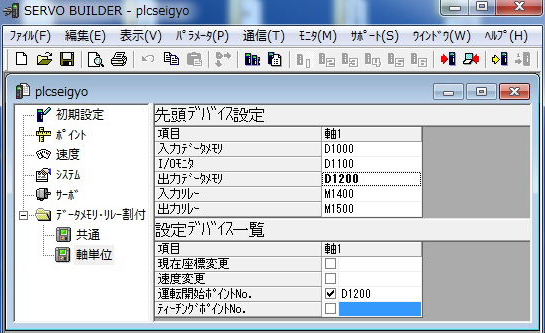
D1200番を設定し『運転開始ポイントNo』のみチェックしています。
軸単位の入力リレーです。
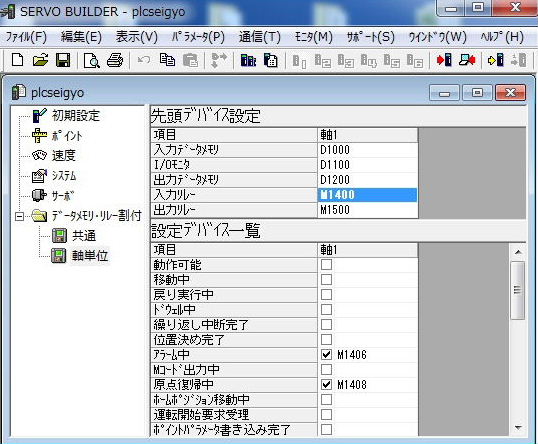
M1400番を設定し『アラーム中』『原点復帰中』をチェックしています。
上記2点のみでなく全てチェックして使ってみたことがありますが
通信項目が多いと、通信速度に影響し誤動作の懸案が出てきましたので
『動作可能』や『動作中』などの重要な項目は有線のI/Oにて通信しています。
軸単位の出力リレーです。
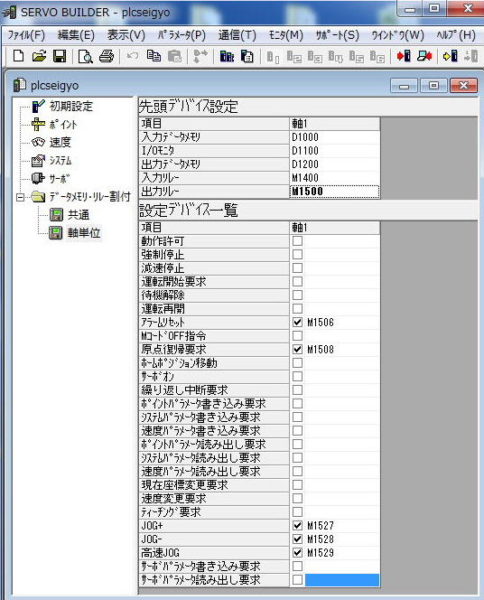
M1500番を設定し『アラームリセット』『原点復帰要求』『JOG+』『JOG-』『高速JOG』
にチェックを入れています。
これでパラメータの設定は終了です。
○パラメータの転送です。
パソコンとサーボアンプMV42を通信ケーブルで接続します。
ケーブルの詳細は下記のページで紹介しております。
SERVO BUILDER の上部タグの『通信』→『通信ポート設定』をクリックします。
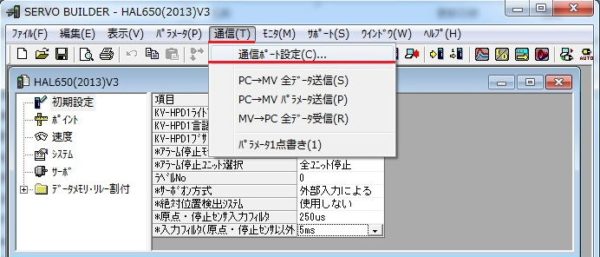
『通信ポート設定』が開きます。
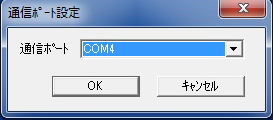
通信環境を確認し通信ポート設定後『OK』をクリックします。
『通信』→『PC→MV全データ送信』をクリックします。
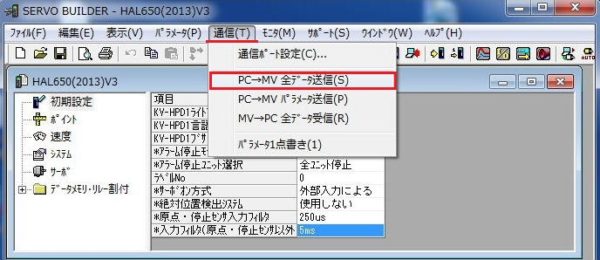
データが転送されます。
少々時間がかかります。
注意点はパソコンの画面が転送終了した画面となってもMVサーボ本体の方はまだ
通信状態の表示となっています。数秒のことですが。このタイミングでケーブルを
抜いたり、電源を切ったりしない様に注意
これで三菱FXシーケンサ RS232Cでキーエンスサーボを制御 パラメータ設定編
の解説を終了とさせて頂きます。
このページの続きとなります、ラダープログラム編は下記のページで
紹介しております。
最後までご覧頂きましてありがとうございました。
スポンサーリンク
トップページに戻る
当記事は、2016年10月30日時点の情報です。ご自身の責任の元、安全性、有用性を考慮頂き、ご利用頂きます様お願い致します。
当サイトに掲載中の画像は当サイトで撮影又は作成したものです。商用目的での無断利用はご遠慮願います。